TTCAN | User’s Manual | Revision 1.6 |
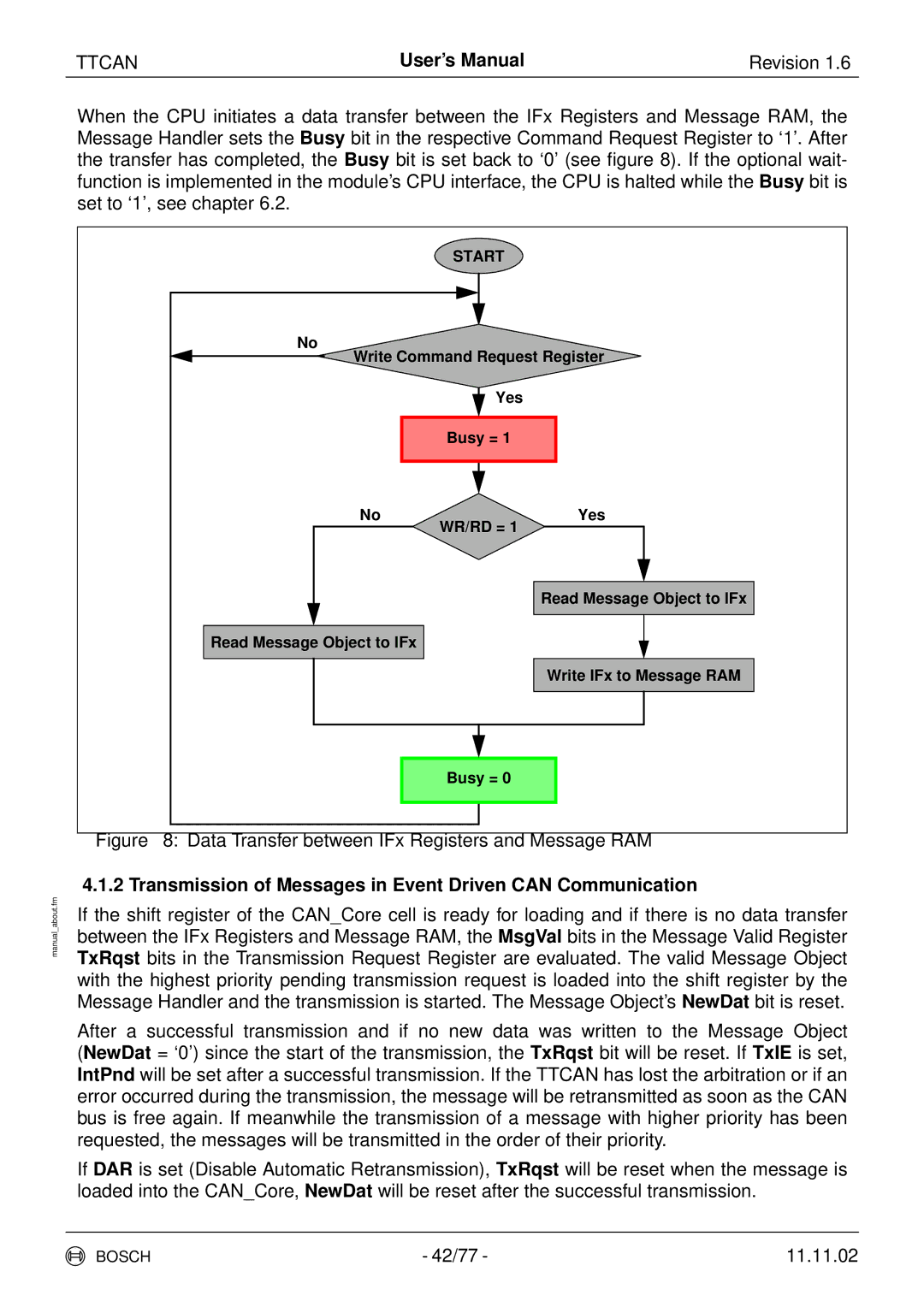
When the CPU initiates a data transfer between the IFx Registers and Message RAM, the Message Handler sets the Busy bit in the respective Command Request Register to ‘1’. After the transfer has completed, the Busy bit is set back to ‘0’ (see figure 8). If the optional wait- function is implemented in the module’s CPU interface, the CPU is halted while the Busy bit is set to ‘1’, see chapter 6.2.
START
No
Write Command Request Register
|
|
|
|
| Yes | ||||
|
|
|
|
| |||||
|
|
|
|
|
|
|
| ||
|
|
|
| Busy = 1 |
|
| |||
|
|
|
|
|
|
|
|
|
|
| No |
|
|
|
| Yes | |||
| WR/RD = 1 |
| |||||||
|
|
|
|
|
| ||||
|
|
|
|
|
| ||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| Read Message Object to IFx | |||
|
|
|
|
|
| ||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Read Message Object to IFx |
|
|
|
|
|
| |||
|
|
|
|
|
| ||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| Write IFx to Message RAM | ||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Busy = 0
manual_about.fm
Figure 8: Data Transfer between IFx Registers and Message RAM
4.1.2 Transmission of Messages in Event Driven CAN Communication
If the shift register of the CAN_Core cell is ready for loading and if there is no data transfer between the IFx Registers and Message RAM, the MsgVal bits in the Message Valid Register TxRqst bits in the Transmission Request Register are evaluated. The valid Message Object with the highest priority pending transmission request is loaded into the shift register by the Message Handler and the transmission is started. The Message Object’s NewDat bit is reset.
After a successful transmission and if no new data was written to the Message Object (NewDat = ‘0’) since the start of the transmission, the TxRqst bit will be reset. If TxIE is set, IntPnd will be set after a successful transmission. If the TTCAN has lost the arbitration or if an error occurred during the transmission, the message will be retransmitted as soon as the CAN bus is free again. If meanwhile the transmission of a message with higher priority has been requested, the messages will be transmitted in the order of their priority.
If DAR is set (Disable Automatic Retransmission), TxRqst will be reset when the message is loaded into the CAN_Core, NewDat will be reset after the successful transmission.
BOSCH | - 42/77 - | 11.11.02 |