Tektronix
Page
Releaseof Copyright
O o o o o o o o a o O o o o o o o o o
O o o o o
O o
O a a o o o
O a o o A a a a a
O o o o o
Warranty
O o
A a a a A o a o o a o o
O o
494A/494APServiceVot.1
A o
O a o o o a o
A o o o o o o o
A o o
O a
494A/494APservice Manuatis divided into two volumes
O o o o o o o
O o o
CONTENTSGonr
O a o o o
O a o o o
A a o o o a o o
O o t
O o a o o o
O o o o o o
O o a o A o o o o o
O o o o a o
Powersupply
A o
RAM
494A/94APServiceVot.1
VOLUME2
O t
O o o o
494A/494APServlceVol
Preselector P3035on theVideoProcessorboard Rejection
O o o
A o O o
494A/494APServtceVot.1
Basicblockdiagramof a -rNsynthesizer
Simplifiedschematicof harmonicmixer
494A/494APServlceVot
Simplifieddigital-to-analog Converter
O o o
O a o
O o a o
SpEctFtcATloNs
944/494AP Service Vot
Options 22 Waveguide
MtxERSCHARACTERTSTTCS
O o o o
Do Not ServiceAlone
O a o
This Manual
O a o o o
Sedon 1 4g4l494Ap Servlce,Vol
A o o o o
SEL
O a O o O o o o
Value.
WM 49OV
Mlxer 18to 26.5to 33 to 490U 40 to
WM 490E 490W
10to 170GHz
O o A o
O o o o
Electricalcharacteristics
O o a o o o o A o o o a
+tAF. x BEF + 20 + 4NHz
Freouencyrelatedcharacteristics
Normal Accuracyand Ldentical Resolution
Characteristic Performance Uirement
Resolution FrequencySpan/Div OverallRange MinimumSpan/Div
KHz 300 Hz 30 Hz 3Hz Typically 30 psldivision of pulse tude
E o o
Freouency Relatedcharacteristics
Freq
O a o s
O o a e
33-s0GHz
Accuracy Steps 10 dB/divLogMode
ReferenceLevel SEt With Data ENTRYpush Buttons
Accuracy Normal or Delta Mode
DisplayDynamicRange Accuracy
RF Attenuatol Range Accuracy Dcto 1 GHz
Performancq Requirement
Delta a Mode provides differential
DecadeTransitions
100 DBc
A07-100
C o
Amplitude
Externalmixer
Inputsignalcharacteristics
O o o a
O a o e
J104 ACCESSORy Pin4 Pin5
Speclfication- 494Al4g4ApService,Vol
1stLO OUTPUTpower
UalrbratorcAL ouT
Teristics
Outputsignalcharacteristics
Line
O a o o
Temperature Operatingand Humidity
Speclfication- 494A1494APService,Vot.1
CE03-15 kHzto 50 MHzpowerleads
CS02-50 KHz to 400 MHz power F u l l l i m i t Leads
15.05 28.85inches232x 392x 732.gmm
O o o o o o o
SrDEvtEw
O c o A a o o
O a o o o o o a o o A o a o o o
494A1494ApService,Vot
Unpackingand INITIALINSPECT6N
PowerSourceand power Requirements
Connectingpower
Installation- 494A/494ApServlce,Vol
O o o A o o o o o o o
O o o o o a o O o a o o o o o o
O o o o o o o
O o a o o o O o o o o o o o O c o O a o o
O o o o o o o o o o o o o o o o o o o
Secton 4g4Al494ApServiceVol
O o o o o o
O o o o o o o o o o o o o o o o o
Eouipmentreouired
Accuracy*0.2s dB io
O o o o o o o o o o o o o o o o o o o o
LodB/soolttffi LrlrGtr
Eouipment Reouired
MAX 10DB/ 2ODB
Preliminarypreparation
O o o o o o o o o o o o
PerformanceCheck procedure 4g4Ll4g4ApServiceVol
O o a o o a o o o o o o o o o o o o o o o o o o o o a
Performancecheckprocedure
TrME/DrV
TIME/DIVAUTO
O o o o a o o a o a o o o
SPAN/DIV
TME/DV Auto Vertcaldtsplay
A a o o o
O a o o o o o
A a o o o o o o o a o o o o o a o o o o o
Center Freouencyaccuracycheckpoints
CheckCenterFrequencyStabilitv
O o a o a A a o o o o a o o o O o a o o o o o o a o
Autoresoln on
Verticaldtsplay
O a o a o a o a a
Resolutionbandwidthauto
O o a o o o o o o a o o o o o a o o
TME/DVAUTO
TlmeMarkGenerator
SPAN/DrV
MarkerOutput
50 Hz 20 ms
O a o a o
O o a a o o o a o a o a a o o a o a o o o o
Autoresoln Reflevel
10dB/Dtv
A o a o o o a
A o o o a o o
A a
TimeAccuracy C.**qyegp WithinS%oftherateserecitJi
O a a o a o a
CheckResolutionBandwidth and shape Factor
O a o O o a o A o
Minnose
Qlglptv to 50Hz, andVERlCnl.drdpr-ry
A o o
O o a o a A o o o o o o o o o o O o o o o
SPAN/DV
MIN RFATTENdB
LowLosscoAxcABLEwrrx sul courEEroid
Nro sMAooaeten
0 GHz
7.4 GHz 9,4 c
O o a a a
O o a o o A o
A o o o o o a
Narrow Videofilter PEAK/AVERAGE
A o a a a o a o o a O o o o
Tmeidivauto
O o a o o o A o
Part
Narrowvideofilter TME/DV Auto PEAK/AVERAGE
O o a
PerformanceCheckprocedure- 4g4Al4g4ApServlceVol.1
O a a
Testsettings
TrME/DtV
Display 21BIDIV
Vertical
Narrowvtdeofilter
TIME/DIV Auto
O o O o a
15.RF attenuato. test equipment setup for 50-60 dB step
Centebfreouency
A a a o a o
Display
Widevideofilter
A o a
O a a o o o o a o A o o o o o
DB/Dtv
O a a
O o a
12s
103 Trr
Resolutionbandwidth 100 kHz
PerformanceCheck procedure- 4g4A/4g4ApServiceVol
Freorange
CheckLO Emission -70 dBmor tess
O a
Autoresoln
Otsplay
18.Test equipmentsetuplor checklngharmonicdistortion
PerformanceCheckprocedure- 4g4Al4g4ApServiceVol.1
EXT
@o@o@g@@
Resolutton
PerformanceCheckprocedure- 4g4A/4g4ApServiceVol. l
Bandwtdth 1 MHz
Verticaldisplay LIN Triggering INT TIME/OIV
Dtsplay 2 dB/DtV
Vertcal
TME/DV EXT
Optioninstruments
Rrttl
I3fil l t r l
CheckHORIZOUTPUTSignatLevel
Dtsplay
Spanidiv
MAX Hold
Tmeidiv Auto PEAK/AVERAGE
Verttcal
Comb Generator Mooule
Ull
Q15oit riline
TR5O2
OutputLevel -dBm Var dB Dot Intensity Off
Gpibverificationprogram
A o o o c
Return
O o o o o o o a o
Return 5OOOREM49XPGPIBVERIFICATION Program
5O9OINPUTT$
O a o a o r
8100PRINT
8070INPUT
9040PRTNT10OMSGEOS
1OO1OPRINTSELECTEDDEVICE-CLEAR...SDC
A o o
16000REM Talkonlymode 16010PAGE
O c
16050PRTNTTALK Jtestng only 16060INPUT
Onlymode Fail
JGPIBvERlFlcArtoH Cotapr-erEo
ANDRENREMorE
JJLrsrEN!TALKTLF OCrnoiness
Message
19300cosuB19390
O o o o o o o O o o o o o o o
Generator
19530REMFAILUREDECISION Handler 19540PRINT!SELECT a UDK
Can Damage
Stancdischarge
Semiconductor Many Componentsused
Thisinstrument
A a o
Adluctment Procedure- 4g4A/4g4ApServtceVot
Preparation
7lu
Selectorswttch
O o o o o o o o o o o o o o o o o o o
Adjustment Procedure- 494A/494ApServiceVol
O o o o o o o o o o o o o o o
O o o o o o o o o o o o o o o o o o o o o o o o o
Rrqm
TIME/DIV MNL
TIME/DIVAUTO Triggeringfreerun
AdJustmantProcedure- 494A/4g4ApServiceVot. .l
Test equlpment setup for adiusting the D€flection Amplifier
Adiustment Procedure- 4g4Al4g4Ap ServiceVol
O o o o o o o o o o o o o o o o
Adfustment Procedure- 4g4Ll4g4ApServtceVot
Triggering EXT
O o o o o o o o o o o o o
AdJustmentProcedure- 494A1494ApService Vot
O o o o o o o o o o o o o o o o o o o o o o o o o o
OuFur GarnR1033 nrors
O a o O o o o o o o o o
Adjustnent Procedure- 4g4A/4g4ApServtceVot
O o o o o o o o o o o o o o o o o o o o o o
=?l
Adjust Log Amptitier
RPlo3s-.8
R1012 R102S,R1030
@o.@@GPt
AdrustmentProcedure 4g4Ll4g4ApServtce Vot
O o a o o o o o o o a o o o a o
A o o o a o o a o o o o o o o o o o o o
Adjustment Procedure- 494l4g4Ap ServiceVot
Filrcsotocr
O o o o O a o o o
AdJustmentProcedure- 4g4l4g4Ap Service Vot
A a o A o O o o
LNorE-l
O o o o o o o o a
O o a o o a o o a a o o o o o o o o o o o o o o
Rcsct
SETTTNGS2
Tion Bandwidth
Tionbandwtdth
O o o o a a
$o o3 $o
O o a o a o a
O o o o o a o o o a o a o o o
Ai kHr
O o o o O o o o o
OotHi
O a o a o a o o o
O a a a a o o o o a o o o o o o o o o o o
MIN RF Atten
Triggering Auto
O a o o O o o a o
Adjustment procedure 4g4Al4g4ApseMce vot
O o a
OTi#i
Frequencyrange
Rplo?2/h
AdrustmentProcedure- 4g4A/494Ap
R1OS4 Frequency
To 3.0-7.1 GHz, set
Ot o
AdfustrnentProcedure- 4g4A/4g4ApServtceVol
A o o o
A o o o o o a
AdJustnentProcedure- 494A/4g4ApServtceVot
@@r
Lt. a o o a o O a o
Snrnasrzen @
Rpzoro
O o o o o A o o o o
Optioninstruments Only
AdjustOption0Z VR BandLevetino
O a o a o o o o o
AdrustmentProcedure- 4g4A/4g4ApServlceVot,I
RFouT OUr
Sectfon6 494A/494ApServicc Vot.1
Introduction
Relativesusceptibilityto Staticdischargedamage
Maintenance- 4g4Al4g4ApServlce Vot
Maintenance- 494A1494ApServiceVol
TroubleshootingAids
367-028s,00
Page
Troubleshooting Using Theerrormessagedisplay
Diagnostics
TUNINGFAILURE- 2NDLO
Powersupplyoutof Regulation
O a o a o
TUNINGFAILURE- 1STLO
Malntenance- 494A/494ApServlceVol
TPl034 GroundRefer€nce
Mixerfreo
Desired
1STLO Setnngaccuracy
Auxiliary Synthesizer
O o o o o o O o o o o o a
Offset SET.540.672KHZ Ting Accu Racy
2NDLO Controldiagnosttca
Lockdisabled Press Help Enable Pressshifttoexit
PHASELOCKFAILURE- 1STLO
Enabledpresshelpto Disable
Strobefreq
Shift Pulsestretcher
O o a o e
Tracemodes
O o a o a
Malntenance- 4S4Al4g4ApServtceVol
Maintenance- 494Al4g4fupService Vof
Corrective Maintenance
A46A1Rl015 446A1Rl010
1R1020
Selectedcomponents
SERvIcING TooLs FoRBoARDTffi3.i*,o= MouNTEDcoMPoNENTs
O o o o o a o o o o o o A a
Mafntenance- 494l4g4Ap ServtceVot.1
HorAlr HepairTerminal
O o c a o o
Maintenance- 494A/494ApServtceVot.1 Diode Color Code
O o o O a a
Replacingassembliesand Subassemblies
O o E a o o o c o o A o o a o a o o
A30A57-GPIB Interface
O o O o o o O o c o o o o a
Sr3- ltI
Maintenance- 494Al4g4ApServiceVot.1
LlrxER
O o o o o o o o o o o o o o o a o o o o o
Page
EAUloNl
Main PowerSupplyModule Removal
UpJ
@o @@tr\
O o a o o o o o o o o o o O o o o o o o o o o o o o o o o
Maintenanceadjustments
Eouipmentrequiredforreturnlossadjustment
Malntenance- 494A/494ApServiceVol
O o o o o o o o o o o o o O a o o
Mafntenance- 494A1494ApServtceVot.1
A o o o o o o o o a o O o o o o o a o o o
O o a a o o o o O o o o o o o o o o o o a o o
O a a o a o o a a a o a o a o o o
829lr/lHzCoaxial Band-passFitterAdjustment
O o o o o o o o o o o
O o o o o o o o
Maintenance- 494l4g4Ap ServlceVot
O o o o a o o
Malntenance- 494A/4g4ApServiceVol
O a o o O o o o o a o o o o o o o o o o
17.Corect re3ponsetor g29 MHr tlrlrd and fourth resonators
O o o o a o o
O o o o o o o o a o o
O a o o
O o o o o o o o o o o
Calibrated100 MHz.with +20 kHz accu
A o o O o o
O o a o o
Lr.fry- gllpin . DoNorposinouexy op
Ffiffi
Maintenance- 494A/4g4ApServtce Vot
O a o a o a o o
Maintenance- 4g4Al494ApService Vot.1
Mafnfenance- 4g4Ll494ApServtceVot.1
A a o a o o o
O a a o o a o o
A a o a o o o o o
R404OFine TuneRanee
Maintenanco- 4g4A/4g4Ap ServlceVol
O a o a
O a a o o o a o a o o
A o o
FREOSPAN/DV MAX
Malntenance- 494A1494ApServtceVol
O o o a a o o
Start Spur Amplttude
Capableof measuring0 Ogmit 2 t\,tt-tz
FREQSPAN/DV MAX
O o o o a a o
FREQSPAN/DIV MAX Autoresoln on
FREQSPAN/DIV MAX Autoresoln Reflevel
Range
Minrf Atten
Timeidv
Malntenance- 494A/494ApServlce Vol
HhFr $ f
F t
A o O o o o a o o a a o
Malntenance- 494A/4g4ApServiceVot
Ll,l
Jdl tt
Settings
Maintenance- 494A/4g4ApServtceVot.1
A a
O o o o a
O a
O o o o o a o
C o o o O o o o o
AddressBusTest
0xxx U302s
Maintenance- 494A1494ApServiceVot..t
SwtTcH
Maintenance- 494A/494ApServtceVol Instrument Bus Test
Troubleshootingon Instrumentbus
O o o o o a o o
Yr iffiI
Responseto ADDRquery DATAinstrumentbus data command
ADDRinstrumentbusaddresscommand
Malntenance- 494Alttg4ApService Vol
CombinedADDRcommandand DATAcommand
DATAinstrumentbus dataquery
InstrumentBusRegisters
Instrumentbusregisters
X x x 0 0 X x x 0 1 X x x 1 0
DB7-DBO
DB3-DBO
O a o A e
Extmixer
DBO DB5-DBO
Rfinput
DB2
O o o a a
DB7-O DB3-DBO
LSB
Vco
DB6 DB2 DBO
DB2-DBO
Front-PanelRegisters
Tapedatatransferprogram
Maintenance 4g4ful4g4ApService Vol
OFF
E o
O o o a
A o o o A o o o a o o
Finished
O o o o a o
O t a
O o o O o o o a
O o t O o o a a o O o a a o o o a o a o o o o a o o
O o o o O o o a o o o o a o o o o o o o o A o o
Pr signals. Blockdiagrams Showingmore
Secton 494A1494Ap Service,Vot
Rollow
O o o o O a o o a o o o o o o o o o a o o O o o o o o
Page
Lst ConverterDiagram12
RF InterfaceCircuits Diagram28
RF Input TheRFINPUT50 connectoracceptstheinputsig
O o o o o o o o o o
Andpassesdtttreiueniy oro
O o o o o o o o o o o o o O o o o o a o o o o o o a o
Page
Theoryof Operafon 4g4A/494ApServlce,Vot
O o o o o o O o o o o o o
Tabte7-1
2NDCONVERTERIF Selection
O o o O o o a o o o o o o o o
2472MHz2ND CONVERTERDiagram12
O o o a o o o o o o o o o o o
CAvrrYPosr+l+
Ou-Too---l
Theory of Operaton 4g4A/4g4ApService, Vol. .l
Precision
ExternalCabtes
O o o o O o a o o o o O a o O a o o
2182MHz PHASELOCKED2nd LO Diagrams13
O a o O o O o o o
Vco
O a o a o o o o o o o o a o o a o o
O a O o a o
MHz 2nd Converter Diagrams15
O o a a o o o
A o a o
O o o o o o o a o o o a o o o
A o a o o o o o o
Switchandamplifier
Otr
829MHz2nd Conv
O o a a a o o o O o o a
Page
O o a a o o o o o
O o a a o o a o o o
Theory of Operation 4g4Al4g4ApService,Vol
110MHztF AMpLtFtERDiagram17
A o o a
3rd CONVERTERDiagram17
110MHzFTLTERS Diagram17
A o o o O o o o O a o
A o o o o o o
O o o O o a o O a o
REFERENCELOCKDiagramS0
O o A o o o o o o a
Bandwidthselection
VariabfeResolution Diagrams19, 19,104Id,and
A o o o o o O o o
A a o o o o
O o O o o
GalnRequired
BandLevetingCircuitDiagram20
A o o O o
Fn9 input signat.at a nominal14 dBm, is applied
LOc AMp and Detector Diagram22
316
O a o o a
0316
316 684
O o o
Theory of Operation- 4gA/494Ap Servtce,Vol
A a o o
Functionaldescrtption
VIDEOAMpLtFtERDiagram23
Theoryof Operation- 4g4ful4g4ApServtce,Vot
12. Selecdon ol display positlon on lhe log scale
Theory of Operaton 494l4g4Ap Servlce,Vol
VtDEo PROCESSORDAGRAM24
Ffi rffi
Theory of Operaton 4g4Al4g4ApService,Vol
O o
C2016
C3026
Filtercomponentcombinations
DB2 DB3
Sytemis desisncto opn IT,r-.,.P.,9?
DlclTAL STORAGEDiagrams25
O o
Theory of Operadon- 4g4N4g4Ap Servtce,Vot.l
LI l
Page
O o O a o o
O o o o o
Theoryof Operafon 494A/4g4ApServlce,Vol
O o o o o o a o o o
O o a a A o a a o o
O o e
500 digitalstoragesweep positions. The resulting
DEFLECTIONAMpLtFtERSDiagram27
Clisplayappearsas a bright dot sweepingacross
Axisand RF Interface DTAGRAM28
O a o o O o o
Transferswitchdriver
Enables Currentdrivers
O o O o o a o o A o O o o o o o o o O a a
MHztF high Stateor F829 MHzlF towstate
HTGH,VOLTAGESUPPLYDAGRAM29
O o A o O o o o O o a o
CRT READOUTDAGRAM30
O o o o o O o o o o o o
Lf BLANKMSBof the characterdatais not set,the
GEN RUNNTNGflip-flopunassertsR/o oFF throughoR
Theory of Operatlon 4g4A/4g4Ap Service, Vol
O o o o o o o o o o o o o o o o o o o o o o o o o o o o
Theory of Operation- 4g4Ll4g4ApService,Vot. l
Zo-cou I lF-€
OFFTME u1055-d
X x o o o o o
X x x x x x
X o o o o o
X . o o o o o
Theory of Operation- 4g4l4g4Ap Servlce,Vol
O o o o o o o o o o o o o o o o o o o o o o o o o o o o o
\i o
Oe o
Address of Ascii code Skip bit Blank character
58O
Theory of Opera$on- 494l4g4Ap Servtce,Vol
O o o a o o o o a O o o o o o o o O o a
Theory of Operaton 494A/494ApService,Vol
SWEEPDiagram31
A o o o a o o o o o O a o o o o o a o o
20ssldiv 100
A o o O a O a o o o o o o o o
D4 D3 D2 D1 do
O a o o a o o o a o o o o o
Theory of Operation- 494A/494ApService,Vol Tabte7-12
Triggerselectionmodes
TriggerMode Freerun Internal Ext€rnal Line TableZ-13
O a a o a o
A o a o o o o
A o a o A a o o o o a o o o o o O o o o o O a A o o o o o o
A o A o o A o o o o a o o
SPANATTENUATORDiagram32
20k
Theory ol Operaton 4g4A/494ApService,Vot
Calibrationcontrolselectioncodes
O o o o a a a o o A o o a a a
1st LO DRTVERDiagram33
Xl K3065 x0.1 K3075 x0.01 K4072
X0.01
DB4
O o a o o o o o O a a o a O o o o o o o o o o a
DB7
A o
Preselectordriver Diagram34
O o a a o o o A o
O o a o o o o o
O o a o a o a o
U5031OUTPUTLINES
Span Volts Span Volts
TabteT-18
Theory of Opera0on- 4g4\l4g4Ap Servlce,Vot
Preselector Freouencybands
O o A a a a o O o o
Centerfreouencycontrol DIAGRAM35
A o a o o o o
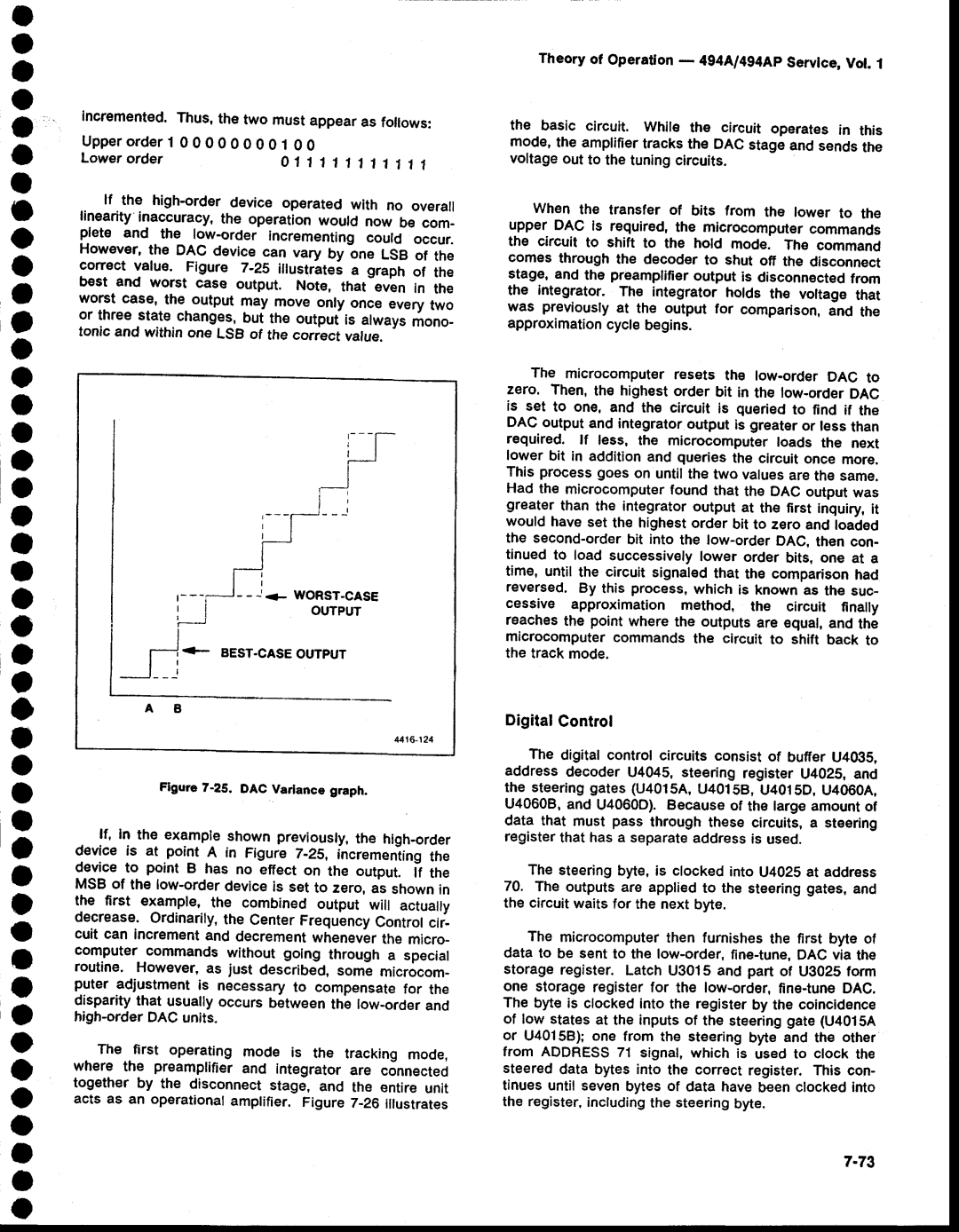
Figure Z-2S. DAC Varlance graph
O o a O o o
Ruooeour
O o O a o o A o
Theory of Operaton 494l4g4Ap Servlce,Vot
ADDRESS70 Formats
O o o a o
C o a o O o o o o o o o
O o a o o o a o
O o o O a a
Theory of Operation- 4g4ful4g4ApService,Vot
Functionaldescription
HARMONICMIXERDiagram36
O a a A o o
AUXILIARYSYNTHESZERDiagram37
Theory of OperaUon- 494Al4g4ApServtce,Vot.1
O o o o o O a o o o o o a A o
Theoryof Operation- 4g4A/494ApService,Vol
Page
COUNTERBOARDDiagram38
Phaselocksynthesizer Diagrams39
O o o a
O e o o o o o o o o o o o
O o o o o e
U2025OUTPUTLINES
O e o o a o o o o o o o o o
Page
Theory of Operation- 494l4g4Ap Service,Vot
DIGITALCONTROLDiagram9
30. System memory map
Theory of Operation- 4g4Ll4g4ApServlce,Vol
31. UOaddr€ssspace
Theoryof Operation- 494A/494ApServlce,Vol
O o c o
Theory of Operation- 4g4hl4g4ApService,Vol
Page
Pollbits
A a O o O o o o o o o a o
Bit
O o a o o o o o
A o A a o
Ff nsrrrcrr qrs crccr
A a O o o o o
Lunr
O a o O a o o o o o o
A a O a o o
O o o o O o o a o A o o
O a o
O o o o o o o o a o o o o o o o o
100
O o o o o o o o o a o o
101
102
CoL
O o o o a o O o o o o o o
Main power Supplyfurnishes all the regulated
103
Theory of Operation- 4g4A/494ApServlce,Vol
O o o o A o o o o o
O a o o o o o o o a o o o o o
Theory of Operaton 494A/494ApServtce,Vot
Theory of Operation- 494l4g4Ap Servlce,Vot
105
Oenanon*l
106 +5 V Voltage ReferenceSupply
Theory of Operation 4g4Ll4g4ApService, Vot
Determiningcomponents 107
O o o o o O a a o a o o a a a o o o a o
Page
RcV/134
Opl ONs
Swtss
CalibratorOutput cALOUT
O a o o o o o o o o o O o o O o o o
A o o o o o o o
O a o O o o o o o o o o o o o
O a o o a o o o o o o o a o o o o o o o
Freouency
Goesanoffi
O o o o a o o o A o A a
Symmetry
OoultnGffi
A o o a o o
Generalterms
A o o o o a a o o o a o o o o
Vtdeoimarker
O o o o o o
Gfoesary- 494l4g4Ap Service,Vol
Frequencyterms
Amplitudeterms
Digitalstorageterms
A o a o o
O a a o o a O o o o o
O o a o o o
Manual Part No G556O-00 Flrst prtnilng JAN1987 Revleed
Revisioninformation
O o a a o a o o o o o o a o o
12s
O o o o a o
SENSmVTY
Instrument
O o
Efr/sN
O o a o o A o a o
O o o A o a o o O o o o o o o
O o O o o o
Chg. Ref M63911
Product see llst Dale2-22-88
Productsee llst
DeflectionAmplifiertestpointsandadjustments Page5 ol
O a o o o o o o o o
O o o o o O o a
Performance Checkprocedure
Instrument Manual
A o o o O o O a a
ADD
Instbument Partno
O o o o o O o o o a
Product494N4g4Ap ServiceVol
Perfrmanceheck pRocEDURE change stepr r as foltows
Date 5/u9o
O a o o o
O a o o o o
ServiceVot.1
Date 6/1190
Product494N494Ap
LO0
RHI
Vehticaldisplay
Peaiaverage
+ \
+i\
MHz DB Bandwidth
Resolution Verncal Freouency Bandwidth Display Spaivdiv
MHz 10dB 100kHz
DB Bandwidth Limits 60dB Measured
Parti
Resolutionbandwdith
Minnoise Verticaldisplay
Narrow Videofilter TIME/DIV Auto Peaivaverage
Peavaverage
A a a
Tercfgnix CHANcE INFoRMAnoN
Specification
PerformanceVerification
Check1 dB Compressionpoint
Product SeeLlst Date11
FREQUENCYSPAN/DIV 1 MHz RESOLUTIONBANDWTDTH1 MHz
SpectrumAnalyzerUnder Test
Ref. C1-991
A o a o o O c