Introduction
1.2.2Architecture
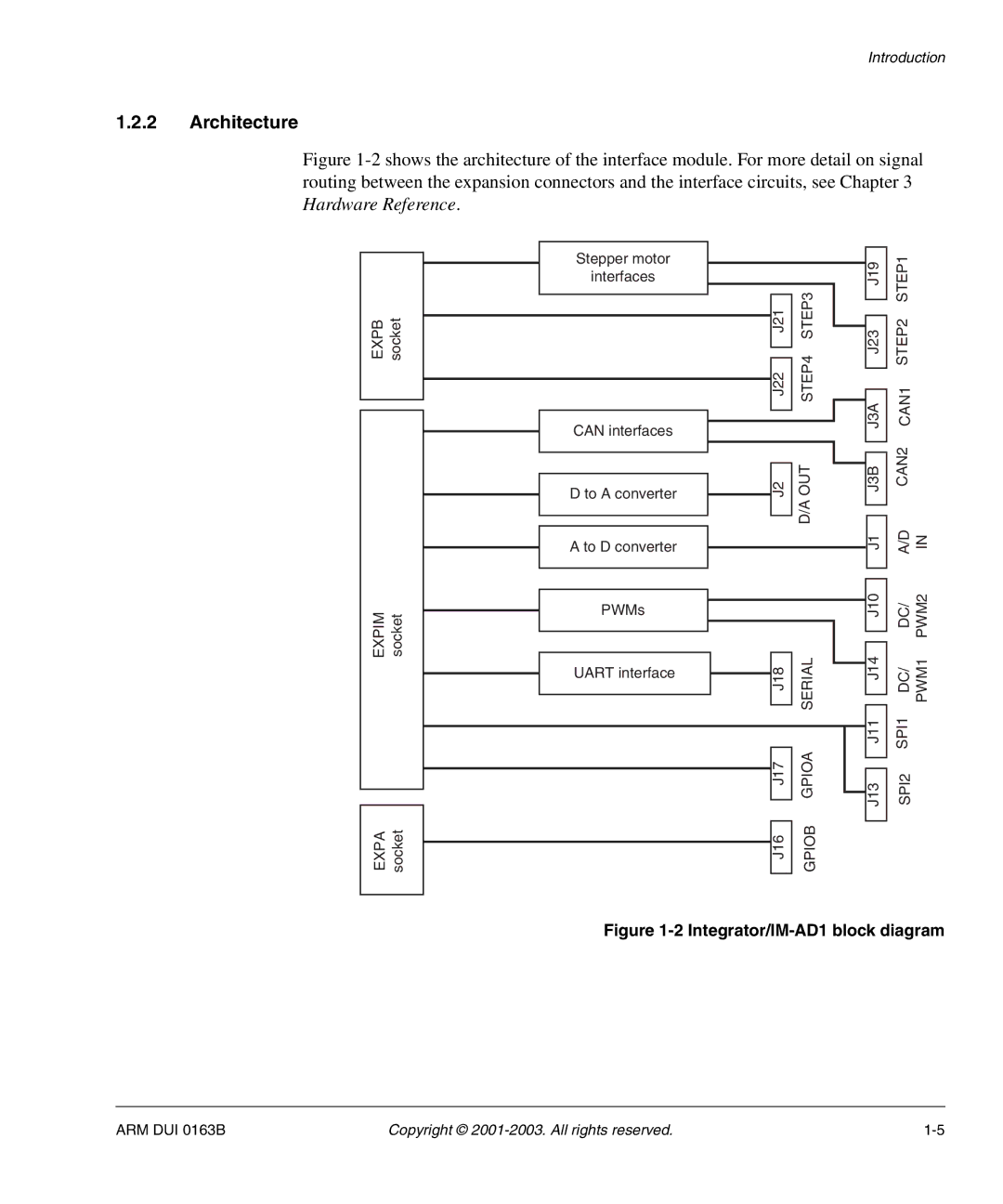
Figure 1-2 shows the architecture of the interface module. For more detail on signal routing between the expansion connectors and the interface circuits, see Chapter 3 Hardware Reference.
|
|
| Stepper motor |
|
|
|
|
|
|
|
|
|
|
|
|
| |
|
|
| interfaces |
|
|
|
|
|
|
|
|
|
|
|
| STEP4 STEP3 |
|
EXPB | socket |
|
|
| J21 | |||
|
|
|
|
| ||||
|
| |||||||
|
|
|
|
|
| |||
|
|
| J22 |
|
| |||
|
|
|
|
|
|
| ||
|
|
| CAN interfaces |
|
|
|
|
|
|
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| J2 |
| OUT | |
|
|
| D to A converter |
| ||||
|
|
|
|
| ||||
|
|
|
|
|
| D/A | ||
|
|
|
|
|
|
| ||
|
|
|
|
|
|
| ||
|
|
| A to D converter |
|
|
|
|
|
|
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
EXPIM | socket |
| PWMs |
|
|
|
|
|
|
|
|
|
|
| |||
|
|
|
|
|
|
| ||
|
|
|
|
|
|
| ||
| UART interface |
|
|
|
|
| ||
|
| J18 |
| SERIAL | ||||
|
|
| ||||||
|
|
|
| |||||
|
|
|
|
|
|
| ||
|
|
|
|
|
|
| ||
|
|
|
|
|
|
| GPIOA | |
|
|
|
|
| J17 |
| ||
|
|
|
|
|
| |||
|
|
|
|
|
|
| ||
|
|
|
|
|
|
| GPIOB | |
EXPA | socket |
|
|
|
|
| ||
|
|
| J16 |
| ||||
|
|
|
| |||||
|
|
|
|
|
|
|
|
|
![]() J13 J11 J14 J10 J1 J3B J3A J23 J19
J13 J11 J14 J10 J1 J3B J3A J23 J19
STEP1 |
|
STEP2 |
|
CAN1 |
|
CAN2 |
|
A/D | IN |
DC/ | PWM2 |
DC/ | PWM1 |
SPI1 |
|
SPI2 |
|
Figure 1-2 Integrator/IM-AD1 block diagram
ARM DUI 0163B | Copyright © |