Manuals
/
Emerson
/
Household Appliance
/
Pet Fence
Emerson
P/N 400518-02
manual
FM-2 Dimensions and Clearances, FM-2 Module Dimensions
Models:
P/N 400518-02
1
157
178
178
Download
178 pages
47.65 Kb
154
155
156
157
158
159
160
161
Specs
Error messages
Cable Diagrams
Pulse Signal Type
Following Error Group
Disconnecting Communications
Dimension
Configuration Group
Problem/Message Cause Solution
Reset
Page 157
Image 157
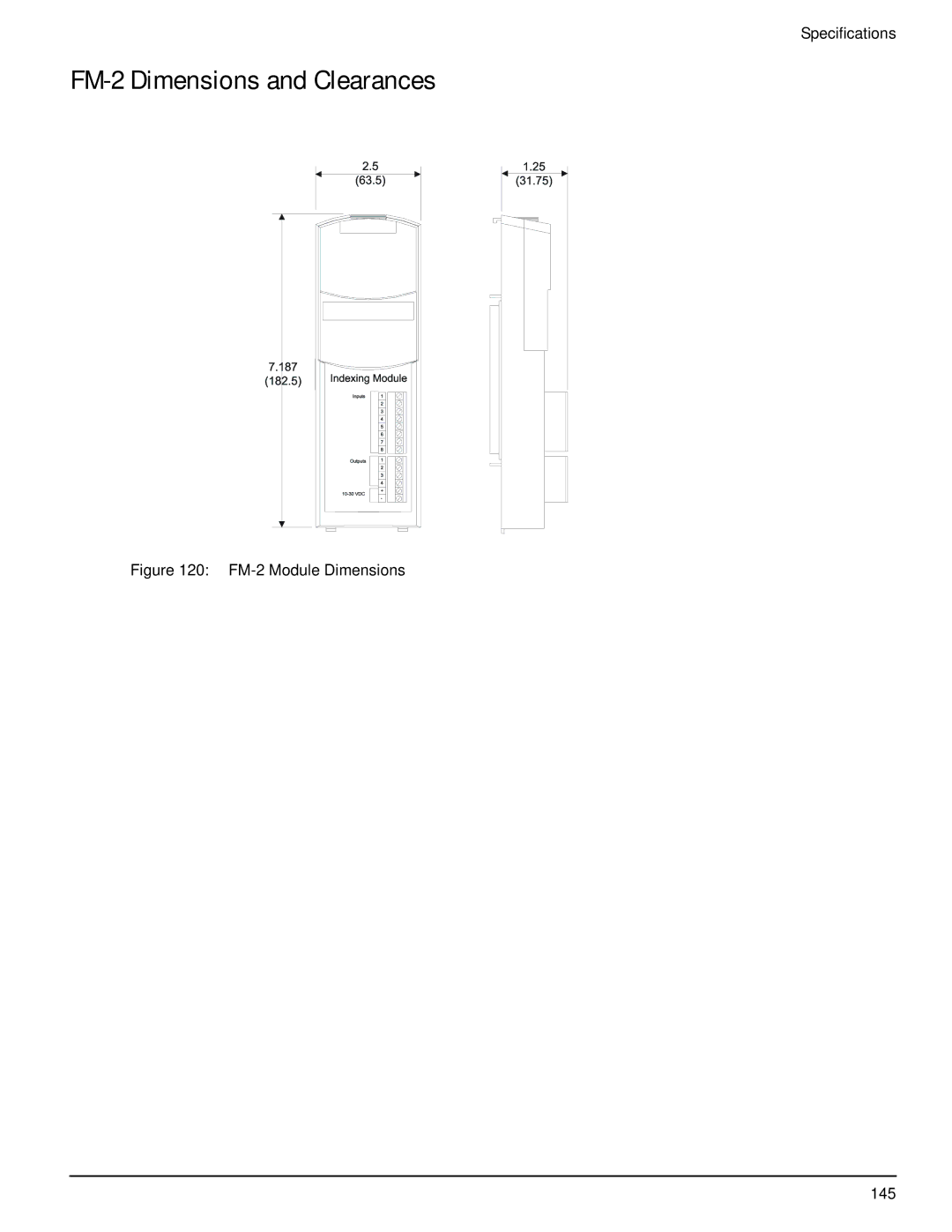
Specifications
FM-2
Dimensions and Clearances
Figure 120:
FM-2
Module Dimensions
145
Page 156
Page 158
Page 157
Image 157
Page 156
Page 158
Contents
Reference Manual
Page
Page
Page
Customer Support
Document Conventions
Customer Service Sales 952 995-8000 or 800
Epsilon Only
Reference Materials
Safety Instructions
General Warning
Qualified Person
Page
Setup, Commissioning and Maintenance
Safety Considerations
Safety of Machinery
Enclosure
General warning
Identification of Safety Information
Table of Contents
Diagnostics and Troubleshooting 109
Tuning Procedures
Options and Accessories
Specifications 143
Epsilon Indexing Drives
Introduction
FM-2 Indexing Module
FM-2 Indexing Module Feature Location
Graph View
Setting Up Parameters
Data Capture Group
Data Group
Timing Group
Configuration Group
Setup View
Identification Group
Motor View
Switching Frequency Group FM-2 only
Drive Encoder Output Group
Positive Direction Group
Use Motor Data From .ddf File Check box
Motor Type List Box
Motor Parameters Column
Values from Drive Column
Apply to Config. Button
Run Auto-Tune Button
User Defined Motor Name Conflict Dialog Box
Save .ddf Values Button
Create new motor entry In .ddf File
Existing Motor Names List Box
Overwrite existing .ddf file motor entry
Retain existing Motor Parameters without saving to .ddf
Distance Group
User Units View
Velocity Group
Time Scale Group
Position View
Acceleration Group
Index In Position Group
Rotary Group
Following Error Group
Online Tab
Motor Position Group
Encoder Position
Following Error
Pulse Input Posn
Limits Group
Velocity View
Trigger Group
Online Tab Velocity Group
Ramps View
Settings Group
Torque View
Ramps Group
Online Tab Torque Group
Tuning Group
Tuning View
Load Group
Low Pass Filter Group
Position Error Integral Group
Alternate Mode Selection
Alternate Mode View
Fault Enable Group
Faults View
Low DC Bus Fault Enable
Encoder State Fault Enable
Input Lines View
Setup
Input Function Window
Active Off Check Box
Debounce Text box
Input Line Window
Attached Function
Outputs View
Configuration
Output Function Window
Output Lines Window
Active Off Check Box
Analog Inputs View
Bandwidth
Analog Full Scale
Jog View
Analog Outputs View
Analog Outputs Group
Jog Fast Velocity
Jog Velocity
Acceleration
Deceleration
Home Type
Home View
Home Reference
Chain to Index
Index # View
Index Type
Index Number
Distance/Position/Limit Distance
Registration Tab
Index Count Group
Calculations Tab
Chain Tab
Index View Chain Tab
Compound Indexes
Status View
Pulse Input Posn Position Command
Status Online Tab
Position Group
Drive Status Group
Time Group
ID Group
Channel 1
Data Capture
Trigger
Graphical Plot
Page
User Interface
Operational Overview
How Motion Works
How Jogging Works
Jog and Jog Fast Velocity
Jog Input Functions
Jog Acceleration and Deceleration
Operational Overview
How Home Works
One Side Home
Standard Home
Initiate Home
Standard Home Sequence
Initiate Home
One Side Home Sequence
Accuracy and Repeatability
Establishing a Home Reference Position
Marker Standard Home only
Sensor and Marker Standard Home only
Sensor and Marker Position
Home Offset
Specified Home Offset
Example 1 Calculated Offset
Home Offset Examples
Example 2 Specified Offset, Greater than Calculated Offset
Specified Offset Screen
Home Limit Distance
End of Home Position
Moving Off Sensor Before Homing
Example 3 Specified Offset, Back up Required
Gear Reducer External Home Sensor
Input Functions
Home Input and Output Functions
Output Functions
Home Limit Distance Hit
Home Examples
Absolute Position Valid
Example 1 Linear Application
Example 2 Rotary Application
Home Screen, Sensor and Marker Selected
Gear Reducer
Complete Motion Sequence
How Indexes Work
Absolute vs. Incremental
Index Type
Absolute Indexes
Absolute Index
Registration Indexes
Incremental Indexes
Rotary Plus and Rotary Minus Indexes
Incremental Index
Index Parameters
Indexes with Rotary Rollover Enabled
Distance/Position
Index Count
Calculations Tab
How Chaining Works
When this index is complete then
Chaining Parameters
Global Chain Count
Index Input and Output Functions
Inputs
Registration Sensor
Outputs
Run Next Index
Repeat Current Index
End of Chaining Count
Examples
End of Index Motion
Index In Position
Example 1 Index1 is chained to Index2 with a Chain Count
Alternate Mode Screen Pulse Mode
How Alternate Mode Works
Analog Torque Mode
Alternate Mode Select
Analog Velocity Mode
Analog Input Group
Torque Mode Velocity Limiting Group
Analog Torque Settings Group
Interpretation Mode Group
Pulse Mode
Pulse/Pulse Interpretation
Pulse/Direction Interpretation
Pulse/Quadrature Interpretation
Pulse Signal Type
Single ended input circuit specifications
Differential input circuit specifications
Differential Source
Single Ended Source
Pulse Mode Acceleration Group
Pulse Mode Ratio Setup Group
Pulse Mode Velocity Group
Distance Recovery Group
Alternate Mode Input and Output Functions
Velocity Group
Torque Group
Encoder Output Scaling
Drive Modifiers
Current Foldback
+/- Travel Limits
Brake Operation
Shunt Operation
RMS Foldback
Epsilon EP-I
Brake Release
Analog Outputs
Brake Control
Brake
Digital Inputs and Outputs
Default Analog Output Source
Analog Output Offset units
Analog Output Scale units
Input Line Debounce Time
Input Function Active State
Output Line Active State
Input Lines Forced On and Forced Off
Brake Control
Input Functions
Brake Release
Index Select 0 through
Jog +
Reset
Jog
Jog Fast
Output Functions
Power Module System Ready MDS Only
Over Temperature Current Limit Active MDS Only
Power Stage Enabled
+ and In Motion
How Communications Work
Configuring Communication
Uploading
Change Path Connection
Downloading
Change Path Dialog Box
Opening an Offline Configuration Window
Offline Setup
Entering General Drive Setup Information
Quick Start
Entering Identification Parameters
Entering Configuration Parameters
Entering Positive Direction Selections
Assigning Outputs
Assigning Inputs
To assign an Input Function to an Input line
To make an Input Function Active Off
To assign an Output Function to an Output Line
Setting Up Jogging
To unassign an Output Function from an Output Line
To make an Output Function Active Off
Jogging Parameter Set-up
Setting Up the Home Routine
Index View Setup
Setting Up Indexes
Establishing Communications with Drive
Online Setup
Opening an Online Configuration Window
Downloading the Configuration File
Printing the Configuration File
Saving the Configuration File
Disconnecting Communications
Operation Verification
Page
Tuning Procedure
Tuning Procedures
Initial Settings
PID vs. State-Space
General Tuning Hints
Tuning steps
101
102
Inertia Ratio
Tuning Parameters
Friction
Response
Feedforwards
High Performance Gains
Line Voltage
Initial Test Settings
Determining Tuning Parameter Values
Inertia Measurement Procedure
Determining Inertia Ratio
Conversion Formula
Ramp Units Conversion
107
Page
Diagnostic Display
Diagnostics and Troubleshooting
Display Fault Action to Reset Bridge Disabled
Fault Codes
Fault Descriptions
EN E Series Only
Max Following Error
Diagnostic Analog Output Test Points
All On
114
Faults View
Drive Faults
Resetting Faults
Viewing Active Drive Faults
Watch Window Select Parameters Window
Watch Window
Select Defaults
Restore Selections Button
Clear All Button
Save Selections Button
Problem/Message Cause Solution
Error Messages
Motor Wiring
Procedure
User Defined Motors
Commutation Basics
120
Encoder Electrical Interfacing
Motor Feedback Wiring
Thermal Switch Interfacing
Encoder Logical Interfacing
Phase Plot of a and B Encoder Channels
Reading Encoder Alignment
Determine Encoder Alignment
CCW Reference Rotation
EUA = 90 + ⎜ tu
CW Reference Rotation
Dynamic Alignment Method
Establishing a Standard Alignment
Static Alignment Method
Determine Motor Parameters
Motor Pole Count
Editing the MOTOR.DDF File
Motor Data
Header
Motor Poles
Motor Parameter Descriptions
Motor Encoder Lines Per Revolution
Motor Encoder Marker Angle
Configuring the Drive
Selecting a User Defined Motor
Verification and Checkout
CW Rotation of the Motor
Rotation Test
Commutation Accuracy Test
Torque Test
Velocity Test
135
Page
Epsilon EP Drive Options
Options and Accessories
OIT-EN-232-XXX or OIT-EN-485-XXX
FM-2 Indexing Module Options
STI-24IO Interface
Dimensions of the STI-24IO Board
STI-EIO Interface
Dimensions of STI-EIO Board
Dimensions of ECI-44
ECI-44 External Connector Interface
142
FM-2 Specifications
Specifications
Drive overload protection
Epsilon EP-I Drive
Dimensions and Clearances
FM-2 Module Dimensions
FM-2 Dimensions and Clearances
TPL =
Power Dissipation Calculation
CMDS-XXX Cable
Cable Diagrams
CMMS-XXX Cable
ESA-SP-485
Snce
SNCDD-915
Sncfli
Sncfloa
Xtmds
Motor Power Cables
Xcmdbs
Xcmds
Xefts
Motor Feedback Cables
Xefcs
Efcs
Page
Glossary
LED
EMC
NVM
Modbus
NTC
PID
RMS
RAM
ROM
RPM
Index
164
Top
Page
Image
Contents