Epsilon
![]()
![]()
![]()
![]()
![]()
![]() NT
NT
Motor







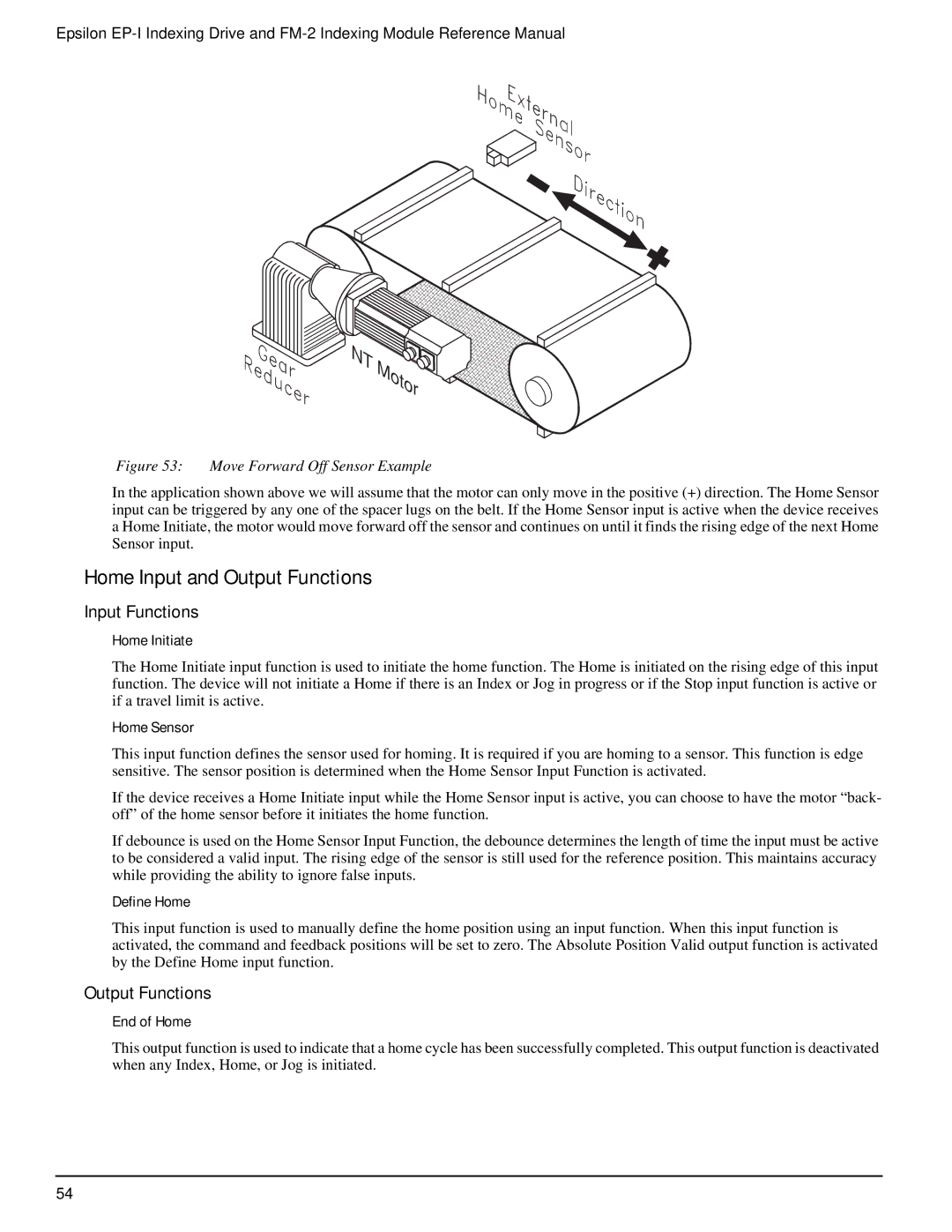
Figure 53: Move Forward Off Sensor Example
In the application shown above we will assume that the motor can only move in the positive (+) direction. The Home Sensor input can be triggered by any one of the spacer lugs on the belt. If the Home Sensor input is active when the device receives a Home Initiate, the motor would move forward off the sensor and continues on until it finds the rising edge of the next Home Sensor input.
Home Input and Output Functions
Input Functions
Home Initiate
The Home Initiate input function is used to initiate the home function. The Home is initiated on the rising edge of this input function. The device will not initiate a Home if there is an Index or Jog in progress or if the Stop input function is active or if a travel limit is active.
Home Sensor
This input function defines the sensor used for homing. It is required if you are homing to a sensor. This function is edge sensitive. The sensor position is determined when the Home Sensor Input Function is activated.
If the device receives a Home Initiate input while the Home Sensor input is active, you can choose to have the motor “back- off” of the home sensor before it initiates the home function.
If debounce is used on the Home Sensor Input Function, the debounce determines the length of time the input must be active to be considered a valid input. The rising edge of the sensor is still used for the reference position. This maintains accuracy while providing the ability to ignore false inputs.
Define Home
This input function is used to manually define the home position using an input function. When this input function is activated, the command and feedback positions will be set to zero. The Absolute Position Valid output function is activated by the Define Home input function.
Output Functions
End of Home
This output function is used to indicate that a home cycle has been successfully completed. This output function is deactivated when any Index, Home, or Jog is initiated.
54