Operational Overview
Home Limit Distance Hit
This output function indicates that no home reference was found while traveling to the Home Limit Distance. The device will decelerate and stop at the Home Limit Distance. This output function is activated when the motor stops. It is deactivated when any index, home or jog is initiated.
Absolute Position Valid
This output function is activated when a Home Routine is successfully completed or the Define Home Input Function is activated. It indicates that the device has been homed. It is cleared by the Home Initiate, an encoder fault and when the device is powered down.
Home Examples
Example 1: Linear Application
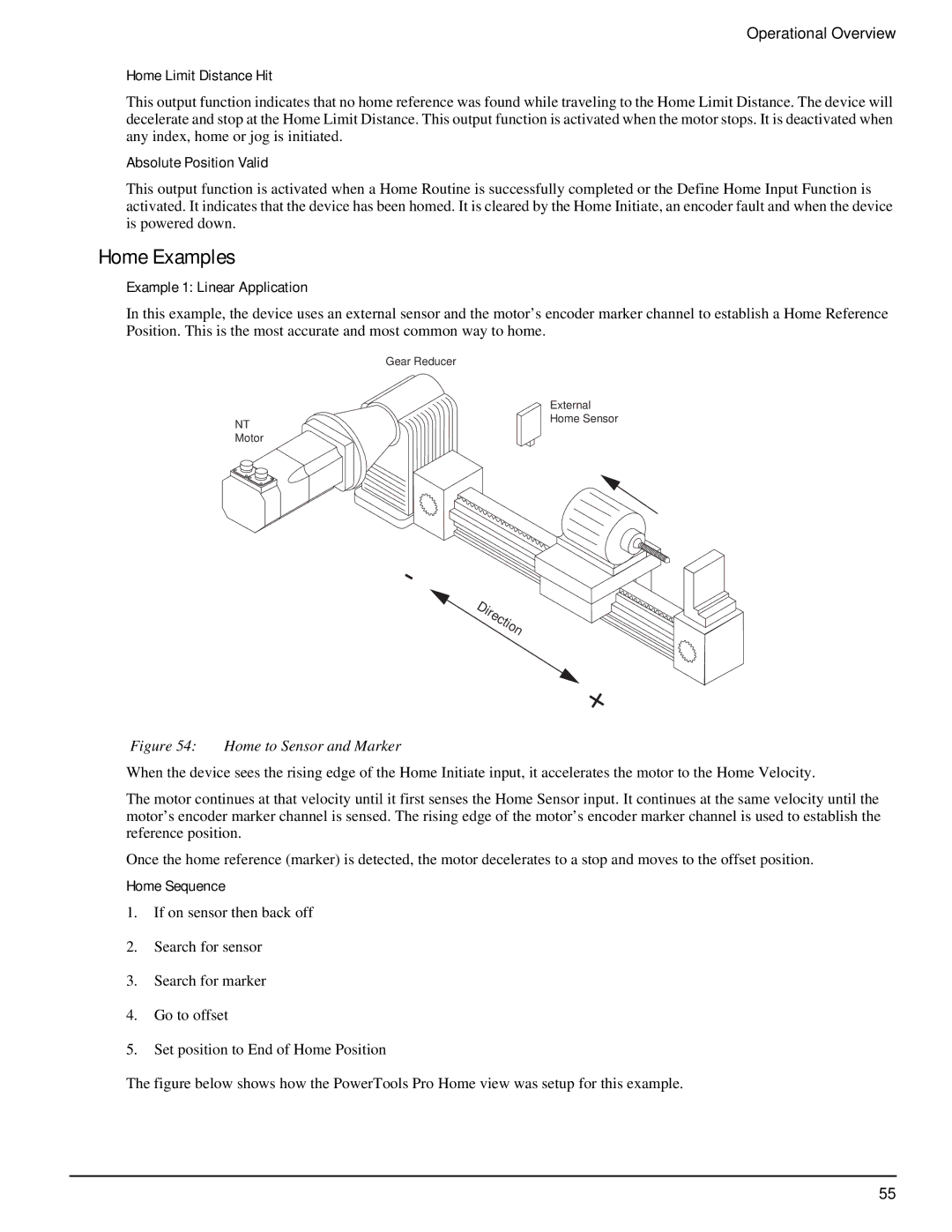
In this example, the device uses an external sensor and the motor’s encoder marker channel to establish a Home Reference Position. This is the most accurate and most common way to home.
Gear Reducer
NT
External Home Sensor
Motor
-
Direction
+
Figure 54: Home to Sensor and Marker
When the device sees the rising edge of the Home Initiate input, it accelerates the motor to the Home Velocity.
The motor continues at that velocity until it first senses the Home Sensor input. It continues at the same velocity until the motor’s encoder marker channel is sensed. The rising edge of the motor’s encoder marker channel is used to establish the reference position.
Once the home reference (marker) is detected, the motor decelerates to a stop and moves to the offset position.
Home Sequence
1.If on sensor then back off
2.Search for sensor
3.Search for marker
4.Go to offset
5.Set position to End of Home Position
The figure below shows how the PowerTools Pro Home view was setup for this example.
55