Epsilon
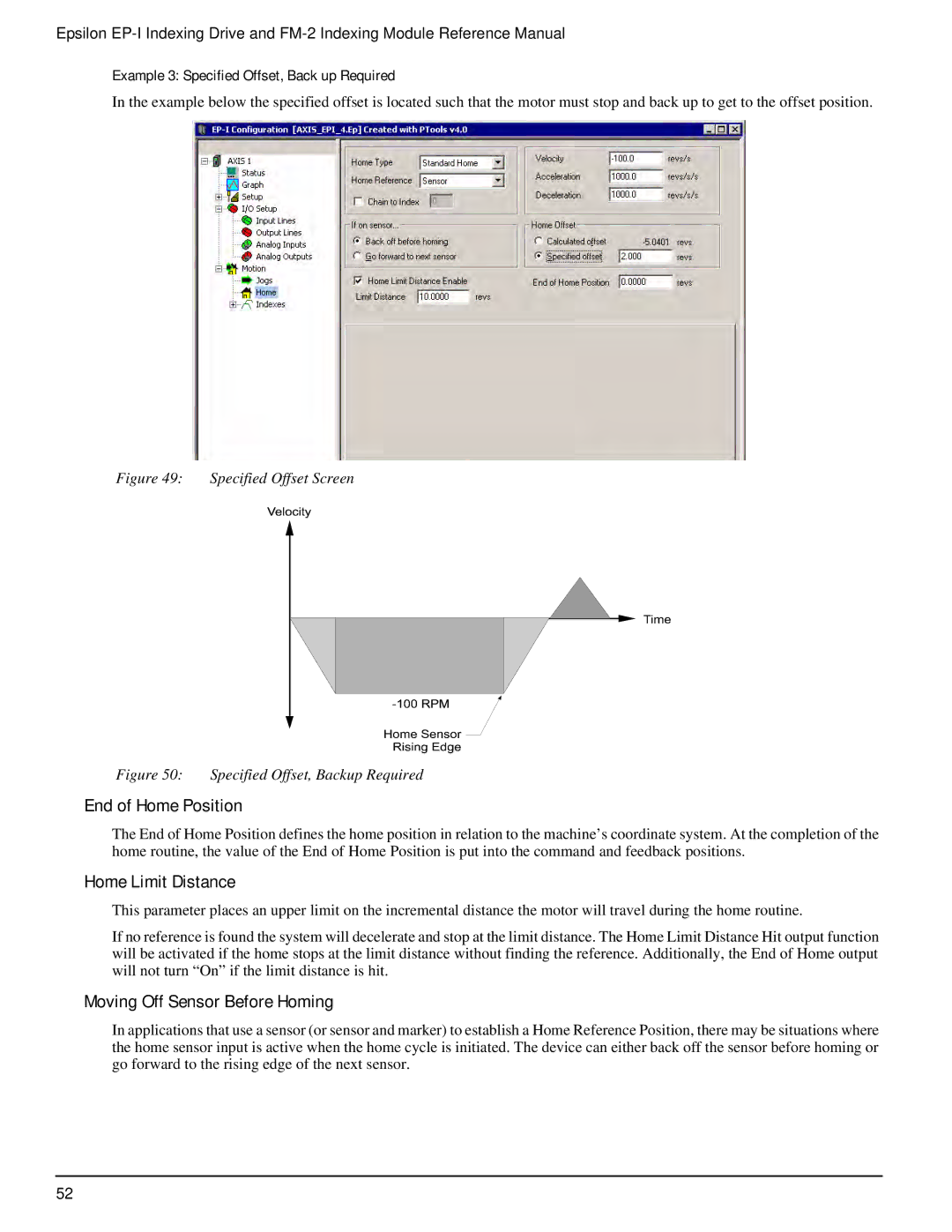
Example 3: Specified Offset, Back up Required
In the example below the specified offset is located such that the motor must stop and back up to get to the offset position.
Figure 49: Specified Offset Screen
Figure 50: Specified Offset, Backup Required
End of Home Position
The End of Home Position defines the home position in relation to the machine’s coordinate system. At the completion of the home routine, the value of the End of Home Position is put into the command and feedback positions.
Home Limit Distance
This parameter places an upper limit on the incremental distance the motor will travel during the home routine.
If no reference is found the system will decelerate and stop at the limit distance. The Home Limit Distance Hit output function will be activated if the home stops at the limit distance without finding the reference. Additionally, the End of Home output will not turn “On” if the limit distance is hit.
Moving Off Sensor Before Homing
In applications that use a sensor (or sensor and marker) to establish a Home Reference Position, there may be situations where the home sensor input is active when the home cycle is initiated. The device can either back off the sensor before homing or go forward to the rising edge of the next sensor.
52