Epsilon
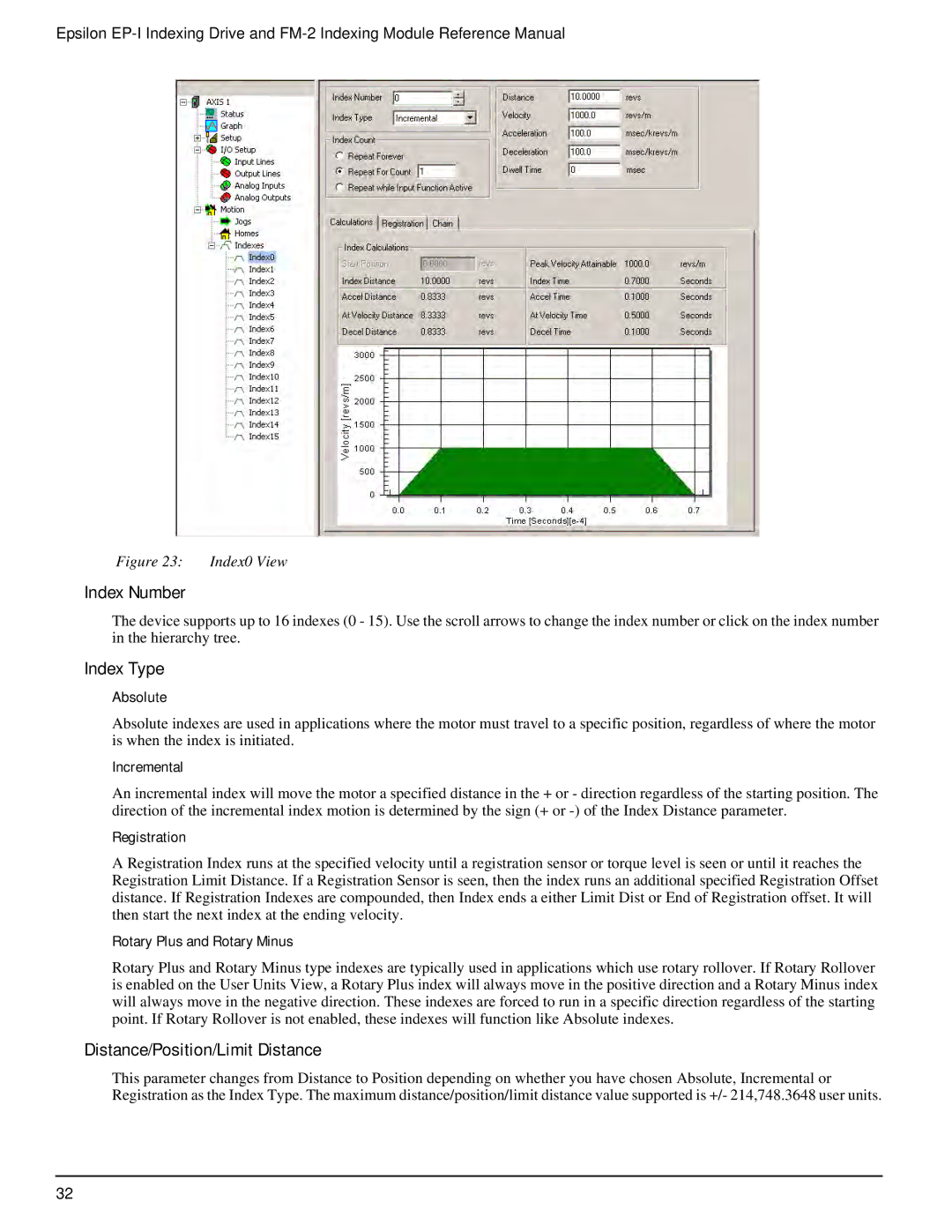
Figure 23: Index0 View
Index Number
The device supports up to 16 indexes (0 - 15). Use the scroll arrows to change the index number or click on the index number in the hierarchy tree.
Index Type
Absolute
Absolute indexes are used in applications where the motor must travel to a specific position, regardless of where the motor is when the index is initiated.
Incremental
An incremental index will move the motor a specified distance in the + or - direction regardless of the starting position. The direction of the incremental index motion is determined by the sign (+ or
Registration
A Registration Index runs at the specified velocity until a registration sensor or torque level is seen or until it reaches the Registration Limit Distance. If a Registration Sensor is seen, then the index runs an additional specified Registration Offset distance. If Registration Indexes are compounded, then Index ends a either Limit Dist or End of Registration offset. It will then start the next index at the ending velocity.
Rotary Plus and Rotary Minus
Rotary Plus and Rotary Minus type indexes are typically used in applications which use rotary rollover. If Rotary Rollover is enabled on the User Units View, a Rotary Plus index will always move in the positive direction and a Rotary Minus index will always move in the negative direction. These indexes are forced to run in a specific direction regardless of the starting point. If Rotary Rollover is not enabled, these indexes will function like Absolute indexes.
Distance/Position/Limit Distance
This parameter changes from Distance to Position depending on whether you have chosen Absolute, Incremental or Registration as the Index Type. The maximum distance/position/limit distance value supported is +/- 214,748.3648 user units.
32