Epsilon
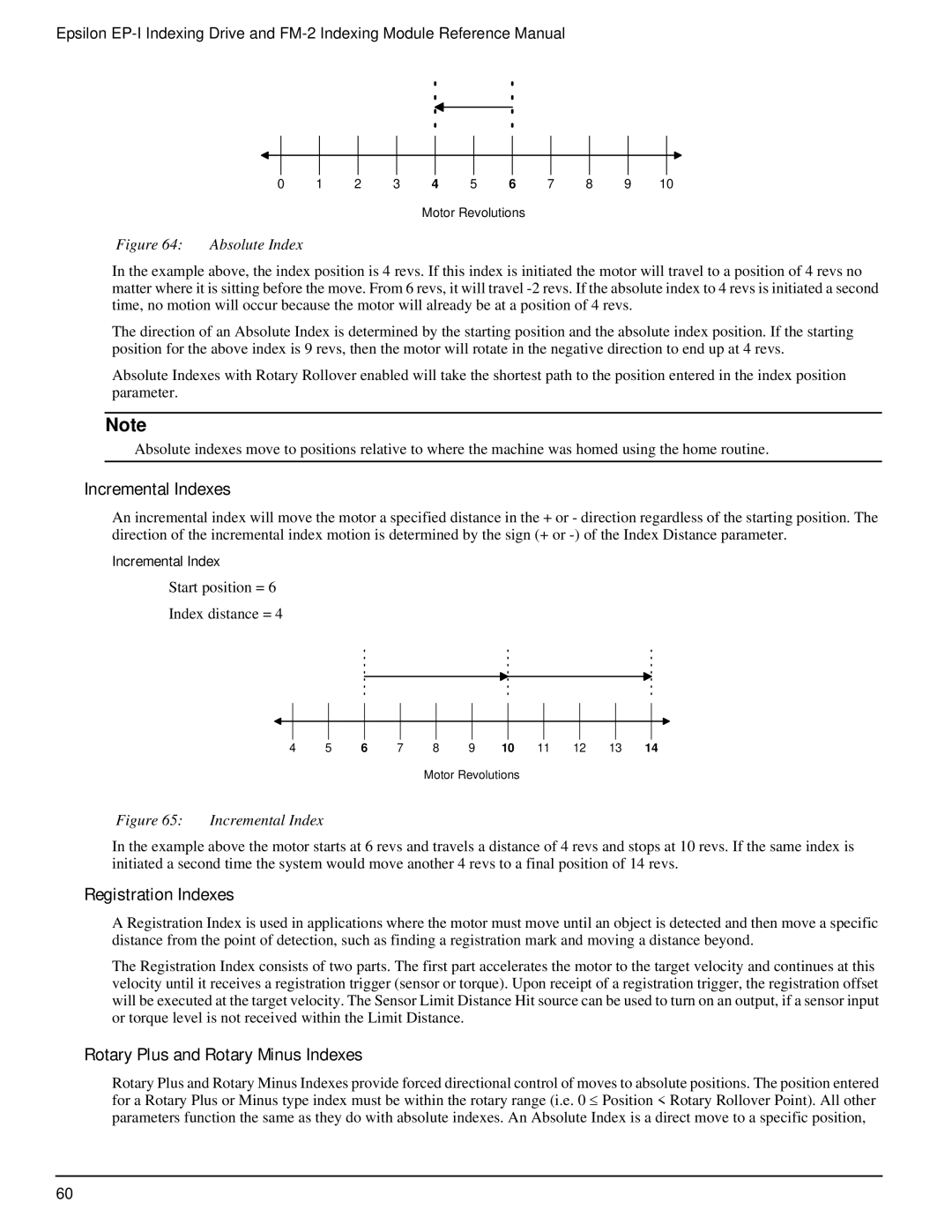
0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
Motor Revolutions
Figure 64: | Absolute Index |
In the example above, the index position is 4 revs. If this index is initiated the motor will travel to a position of 4 revs no matter where it is sitting before the move. From 6 revs, it will travel
The direction of an Absolute Index is determined by the starting position and the absolute index position. If the starting position for the above index is 9 revs, then the motor will rotate in the negative direction to end up at 4 revs.
Absolute Indexes with Rotary Rollover enabled will take the shortest path to the position entered in the index position parameter.
Note
Absolute indexes move to positions relative to where the machine was homed using the home routine.
Incremental Indexes
An incremental index will move the motor a specified distance in the + or - direction regardless of the starting position. The direction of the incremental index motion is determined by the sign (+ or
Incremental Index
Start position = 6
Index distance = 4
4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 |
Motor Revolutions
Figure 65: Incremental Index
In the example above the motor starts at 6 revs and travels a distance of 4 revs and stops at 10 revs. If the same index is initiated a second time the system would move another 4 revs to a final position of 14 revs.
Registration Indexes
A Registration Index is used in applications where the motor must move until an object is detected and then move a specific distance from the point of detection, such as finding a registration mark and moving a distance beyond.
The Registration Index consists of two parts. The first part accelerates the motor to the target velocity and continues at this velocity until it receives a registration trigger (sensor or torque). Upon receipt of a registration trigger, the registration offset will be executed at the target velocity. The Sensor Limit Distance Hit source can be used to turn on an output, if a sensor input or torque level is not received within the Limit Distance.
Rotary Plus and Rotary Minus Indexes
Rotary Plus and Rotary Minus Indexes provide forced directional control of moves to absolute positions. The position entered for a Rotary Plus or Minus type index must be within the rotary range (i.e. 0 ≤ Position < Rotary Rollover Point). All other parameters function the same as they do with absolute indexes. An Absolute Index is a direct move to a specific position,
60