RPM4
Operation and Maintenance Manual
DH Instruments, a Fluke Company
Page
Table of Contents
9RESET
Range Unit Mode
2RES Resolution 3STAB 4UL Upper Limit
Autorange Leak CK Display
Remote Operation
MAINTENANCE, Adjustments and Calibration
115
Pressure
136
Tables
137
Figures
About this Manual
Manual Conventions
RPM4 Operation and Maintenance Manual
Introduction
Product Overview
Pressure Measurement Specifications
Specifications
General Specifications
Quartz Reference Pressure Transducer Q-RPT
Designation
SI Version
RPT
US Version
Predicted One Year Stability ± 0.005% of reading
Compensated Temperature Range 5 to 35 C
ON-BOARD Barometer
RPTs UP to A10M 1500 psi
Battery and Charger Pack
RPM4 Operation and Maintenance Manual
Unpacking and Inspection
Installation
Inspecting Contents
Removing from Packaging
Preparing for Operation
Setup
Site Requirements
Front and Rear Panels
Battery Pack
Power Connection
3.1 85 to 264 VAC, 50/60 HZ VAC Power
Rear Panel
Remote ENT Connection Footswitch or Other Switch
Connecting to Measure Pressure TEST+ and TEST- Ports
Vent or ATM Port
CHECK/SET Security Level
Parallel Measurement Mode
POWER-UP and Verification
Turn OFF Absolute and Negative Gauge Mode Axxx RPT
Switch Power on
Checking Gauge Mode Pressure Measurement
Checking Absolute Mode Pressure Measurement
Check Pressure Measurement Operation
Short Term Storage
User Interface
Operation
Main RUN Screen
Display Field Name Purpose Contents Section
PRESSURE1UNITM hzRR DDISPLAYFUNCIONnn/nn
Function / Data Keypad Layout and Protocol
Sounds
Remote ENT Enter Footswitch
General Operating Principles
Pressure READY/NOT Ready
Multipe Ranges Q-RPTS, Autorange and Infinite Ranging
Active A700K DF Hi psi 100g/100a
Display Symbol
RPT Position
SDS
Using RPM4 with a PPC3 CONTROLLER/CALIBRATOR
Setting Purpose Specific to Section
Open and close SDS
Display
Measurement mode
AutoRange range
Range
To Use the Battery/Charger Pack to Supply RPM4
USE of the 12VDC BATTERY/CHARGER Pack
To Charge the Battery
To Check the Battery Charge Level
SDS Self Defense System
Range
Direct Function Keys
Direct Function Keys Summary
Summary of RPM4 Function Key Operation
Unit
Operation
1kPa 2Pa 3MPa 4hPa 5bar 6mbar
Mode
Absolute
Negative Gauge
Measurement mode 1abs 2gage 3neg gage
Gauge
Differential
Differential Measurement Mode Operation
Meas mode 1abs 2gage 3neg gage 4dif
SDS function
Default Display function
Main run screen measured pressure display
AutoZ function
Negative gauge mode Minus
SETTING/SELECTION Purpose SET to Section
Absolute mode Zero absolute
Gauge mode Q-RPT with
AutoRange A700K Hi kPa 300g/100a
Leak CK
KPa a Leak testing 13 s
Set leak check time 15 s
Display
∆P 0.61 kPa a Hi Rate 0.06 kPa/sec
1avg 2rate 3dev 4RPT 5HiLo 6freeze 7clean
20 s
AVG Average
Averaging Period
0007 18Avg
0001/sec
Rate
Psi a Hi
Current rate of change of pressure in current
Target 100.0000 psi a
Dev Deviation
Psi a zH3 D -0.8865 T100.0000
6.4 RPT
Psi a zHi Psi g zLo
6.5 Hi/Lo
Psi a zHi H 99.2254 L98.0098
Freeze
Clean
Psi a zHi F
Head
Conventional main run screen first line Clean second line
Psi a zHi
Edit head height
Principle
Pmax! 350 kPa a Hi Open SDS? 1no 2yes
Position designator of Q-RPT for which SDS will be opened
SDS in Differential and Parallel Measurement Modes
AU T O Z
Pmax! 350 kPa a HL Open Hi&Lo? 1no 2yes
Autoz in Gauge and Negative Gauge Mode
Autoz in Absolute Mode
AutoZ Hi abs by 1Entry 2COM2 3Lo RPT
Old Poffset 0.0 Pa New Poffset 8.3 Pa
Run AutoZ by Entry
KPa a Pstd,00.00000
Run AutoZ by COM2
Run AutoZ by Lo RPT
Old Poffset 0.0 Pa New Poffset 3.1 Pa
KPa a Pstd,097.7786
Autoz in Differential Mode
ENT RUN Autotest
Saving AN Autorange Range
1RANGE
1range 2res 3stab 4UL 5ATest
Save range A700K Hi kPa 300g/100a
2 2RES Resolution
Deleting Autorange Ranges
A700K Hi kPa 300g/100a
3 3STAB
Display resltn Hi 0.0010 %FS
4 4UL Upper Limit
Stability Hi 0.020 Pa
Upper limit Hi 204.000 kPa a
Upper Lower-110.00 KPa g
5 5ATEST
1AutoZ 2remote 3head 4SDS 5prefs 6Punit 7intern 8cal 9reset
Special
Over Pressure Function
1 1AU T O Z
AutoZ Purpose and Principle
AutoZ in absolute measurement mode with an Axxx Q-RPT
AutoZ ON/OFF
AutoZ in gauge measurement mode with a Gxxx or BGxxx Q-RPT
AutoZ in differential measurement mode
Recommendations for the Use of the AutoZ Function
1off 2view 3edit Abs on
Active Q-RPT designator
Edit Autoz
2 2REMOTE
Poffset, Abs
2.2 3IEEE-488
2.1 1COM1, 2COM2
2.3 4FORMAT
2.4 5RS232 SELF-TEST
3 3HEAD
If a test fails
4.1 1TEMP OPEN/CLOSE
4 4SDS
SDS temporary Hi 1close 2open
SDS full time Hi 1on 2off
5 5PREFS
4.2 2FULL Time ON/OFF
1ScrSvr 2sound 3time 4ID 5level
5.3 3TIME
5.1 1SCRSVR
5.2 2SOUND
Press SPECIAL, 5prefs, 3time. The display is
5.4 4ID
5.5 5LEVEL Security
Security Levels
Function LOW Medium High Range
Unit Mode
Setup
Leak CK Display Head SDS
6 6PUNIT
Password pppppp Disables password
RPM4 SNnnnn-xx Password pppppp
Selecting 1change user level brings up the restriction menu
1SI
Set up unit #6 Unit#6 1SI 2other 3altitude 4user
Define user unit 1.000000 unit/Pa
2OTHER 3ALTITUDE 4USER
7.1 1BARO
7 7INTERNAL
1baro 2ReadRt 3RPT2x 4lo vnt 5log
Auto read rate 1on 2off
Pressure Display Rate of Change Update
7.2 2READRT
% of range span/s
7.3 3RPT2X
7.4 4LO VNT
Test- vent1auto 2open 3close 4view
7.5 5LOG
8 8CAL
Operation See Sections 5.2
9.1 1SETS
9 9RESET
1sets 2units 3ATest 4cal 5all
9.3 3ATEST
Reset Result See Section Unit
9.2 2 Units
9.4 4 CAL
All Q-RPT Calibration PA to zero, PM to
Reset Result See Section
9.5 5 ALL
All SDS full time on 4.2 DH Instruments, a Fluke Company
Interfacing
Remote Operation
Overview
1 RS232 Interface
1.3 COM2
Programming Formats
IEEE-488
PIN # Function Description
Classic Program Message Format
Using Command Type Commands
Enhanced Program Message Format
Using Query Type Commands
Commands
Programming Messages
VER
Error Messagess
Command
Zoffset
Enhanced
Program Message Description Overview
Classic
Abort
Program Message Descriptions
#xx
Enhanced Reply Abort no reply if IEEE-488 Example Sent
Unit
ARANGEn
Range
Mode
‘state’
AUTOZEROn
AUTOZEROn=RUN
Adder
Calamb adder, mult CalDate
CALAMB=adder, mult CalDate
Mult
CONTn
Date
Classic GPIB=addr
Defaults Head 0, cm, N2 Arguments Height
9999. Setting the value to ‘0’ disables the head correction
Classic HEAD=height, units, fluid
LLn =limit
L2 / L3
LLn
Limit
MMODEn
NVENTn
PCALn= adder, mult CalDate
PCALn
Adder, mult CalDate
PRn
Qprr
PRR
PRR
QPRR?
Rng
RATEn
Period
READRATEn
READYCKn
REMOTE?
Reset
RESET?
RESn
Close
RPTn
SDSn
SDSAUTO, Sdsact
SDSAUTOn
An internal device failure has occurred
Measurement is finished
Lower limits
SS%n
Hhmm
SSn
Ready/Not Ready criteria
UCOEFn
ULn
UNITn unita , ref UNITn unitd , ref
UNITn
UNITn unit , ref UNITn unitn , ref UNITn unitg , ref
UNITn=unit , ref
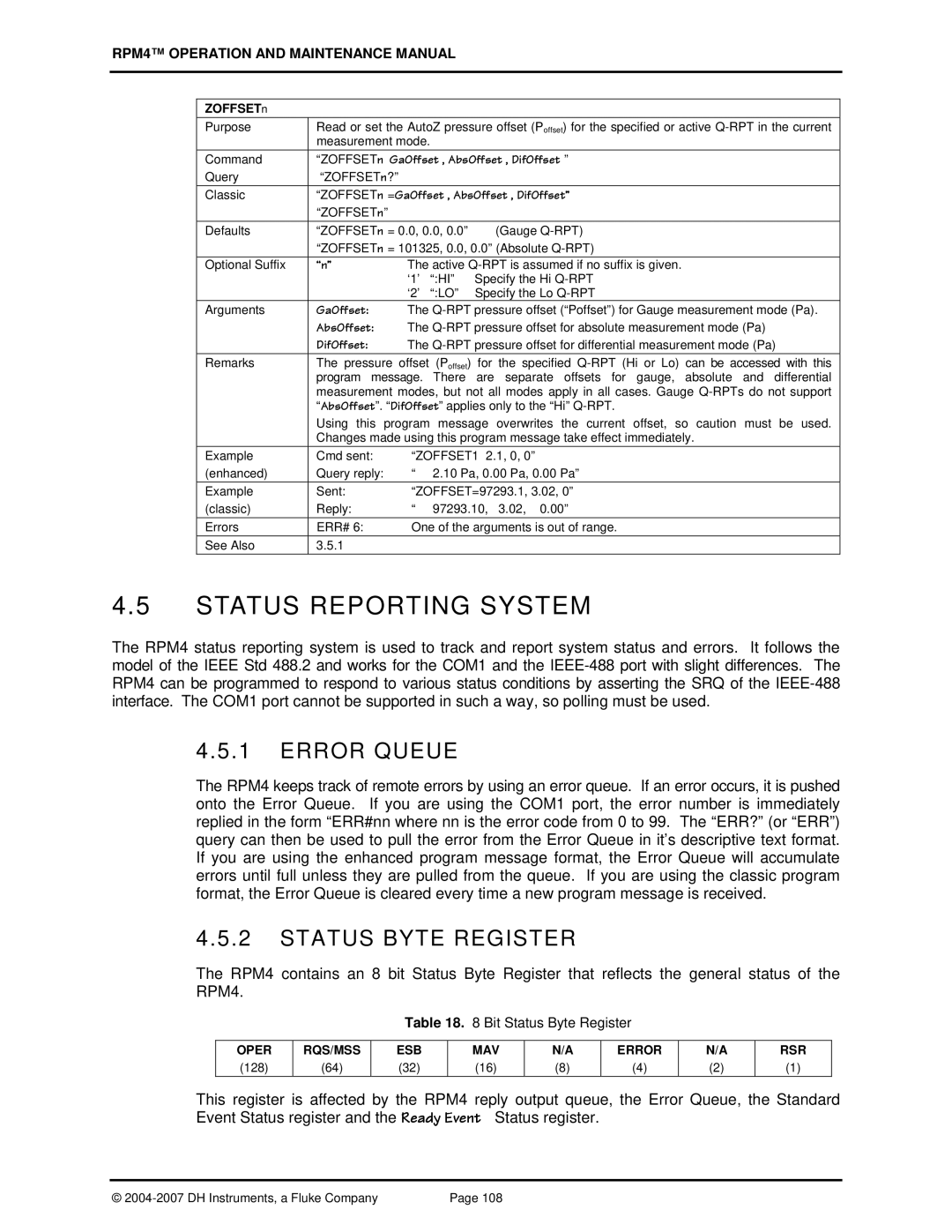
Status Reporting System
Error Queue
Oper RQS/MSS ESB MAV Error RSR
Status Byte Register
Oper
RQS/MSS ESB MAV Error RSR
←←← Output Queue ←←← Error Queue
PON URQ
PON URQ CMD EXE DDE QYE RQC OPC
Standard Event Register
Ready Status Register
Meas Nrdy RDY
Ieee STD .2 Common and Status Program Messages
Program Message Descriptions
Example Sent ∗RST? Enhanced Reply
Bit 6 64 is reserved and cannot be set Remarks
RSE
RPM4 Operation and Maintenance Manual
Calibration of Quartz Reference Pressure Transducers Q-RPTS
Maintenance Adjustments and Calibration
Principle
AS Received and AS Left Data
PA and PM Coefficients
Corrected reading = uncorrected reading PM + PA
GAS Operated Q-RPTS, A10M and Lower
Equipment Required
OIL or GAS Operated Q-RPTS A14M and Higher
SET-UP and Preparation
Calibration Point Segment
Recommended Calibration Point Sequence
Standard Class Q-RPTS
Point Span
SPAN1
Premium Class Q-RPTS
Verification of Premium Class Q-RPTs
25 % 50 % 75 % 100 %
Calibration Point Sequence, Premium Class BGxxx Q-RPTs
15 % 30 % 40 % 45 % 50 % 55 % 60 % 70 % 85 % 100 %
Editing and Viewing Q-RPT Calibration Information
RPT Calibration Using Caltool for Rpts Software
Allow abs Neg g mode? 1yes 2no
Cal date20030325 Hi AbsPoffset 0.0 Pa
Absolute Neg g mode 1on 2off
000000
RPT CALIBRATION/ADJUSTMENT Without Caltool for Rpts Software
Non-corrected reading = corrected reading PA/PM + Poffset
Adjustment of ON-BOARD Barometer
As left reading = non-corrected reading new PM + new PA
Reloading Embedded Software Into Flash Memory
Mini Micro Board
Subassembly Description and Location
Power Supply Module
Micro Card
RPT Module
Driver Board
ON-BOARD Barometer
Display
Condition State
RPT Module Pneumatic Schematics
Valve
Valve Condition State
Axxx Q-RPT A10M with G15K or BGxxx
Access Restricted
Troubleshooting
Symptom Probable Cause Solution
Fatal Fault
Displayed in second line
Check RPT connection
Ready green Ready/Not Ready
SDS Closed is displayed
RPM4 Operation and Maintenance Manual
Appendix
Black wire White wire DH Instruments, a Fluke Company
Remote ENT
To Convert from Pa To
Unit Conversion
Pressure
Multiply by
Warranty
RPM4 Operation and Maintenance Manual
DUT
Glossary
HL Q-RPT
PPC3
Qdut