ProMix PD2K Proportioner for Automatic Spray Applications
Important Safety Instructions
Contents
Manual No
Related Manuals
Manual No Description
0359
Models
ECB Labels
Model AC2000 High Pressure Identification Label
Fire and Explosion Hazard
Intrinsic Safety
Personal Protective Equipment
Moisture Sensitivity of Isocyanates
Important Isocyanate ISO Information
Isocyanate Conditions
Keep Components a and B Separate
General Information
ADM Display
USB Download Procedure
Advanced Display Module ADM
USB Upload Procedure
ADM Keys and Indicators Function
ADM Keys and Indicators
Key Function
Soft Key Icons
Soft Key Functions
Key Function
Screen Icons
Navigating the Screens
Pre-Operation Tasks
Pre-operation Checklist
Power On
Valve Settings
Initial System Setup
Flush Before Using Equipment
With Color Change
Without Color Change
Prime and Fill the System
Operation Using Automatic Display Module ADM
Spraying
Flush Mixed Material
Purging
Color Change System
Shutdown
Flush the System
Single Color System
PD2K Discrete I/O Connections
Operation Using a Programmable Logic Controller PLC
Network Communications and Discrete I/O
Discrete I/O
Analog Inputs
Digital Inputs
KEY
Discrete I/O Connections on Efcm
CGM Kits
Communication Gateway Module CGM Details
CGM Overview
ProMix PD2K Network Outputs
Output Register 00 Current System Mode
Number Operation Mode Description
Network Communication I/O Data Map
Output Register 06 Actual Mix Ratio
Output Registers 01, 02, 03, and 04 Pump Status
Pump States for Output Registers Description Ber
Output Register 05 Actual Mix Flow
Output Register 12 Active Recipe Material B Flush Sequence
Output Register 14 Active Recipe Potlife Timeout Set Point
Output Register 27 Safety Interlock Input Status
Output Registers 28 36 DCS Command Structure
Output Register 38 40 Software Version
Output Register 37 Time
Operation Using a Programmable Logic Controller PLC
None
Network Output Data Map Read Only
PSI
= ERR
= Busy
= ACK
= NAK
ProMix PD2K Network Inputs
Input Register 00 System Mode Command
Input Register 07 Go to Recipe Number
Input Register 02 Flush/Prime Pump Command
Input Register 03 Mix Pump 1 Control Set Point
Input Register 10 Gun 1 Trigger
Input Register 08 Clear Active Alarm
Input Registers 14 21 DCS Command Structure
Input Register 09 Job Complete
Operation Using a Programmable Logic Controller PLC
Network Input Data Map Write/Read
40180 Gun 3 Trigger Uint32
Purge Mode Sequence
Operation Flow Charts
Inactive Pump Flush and Prime Sequences
Flush Pump Command
Change
Color Change Sequence
Standby Mix Ready? no
Mixing Sequence
Clear Active Alarm
Alarm Clearing Sequence
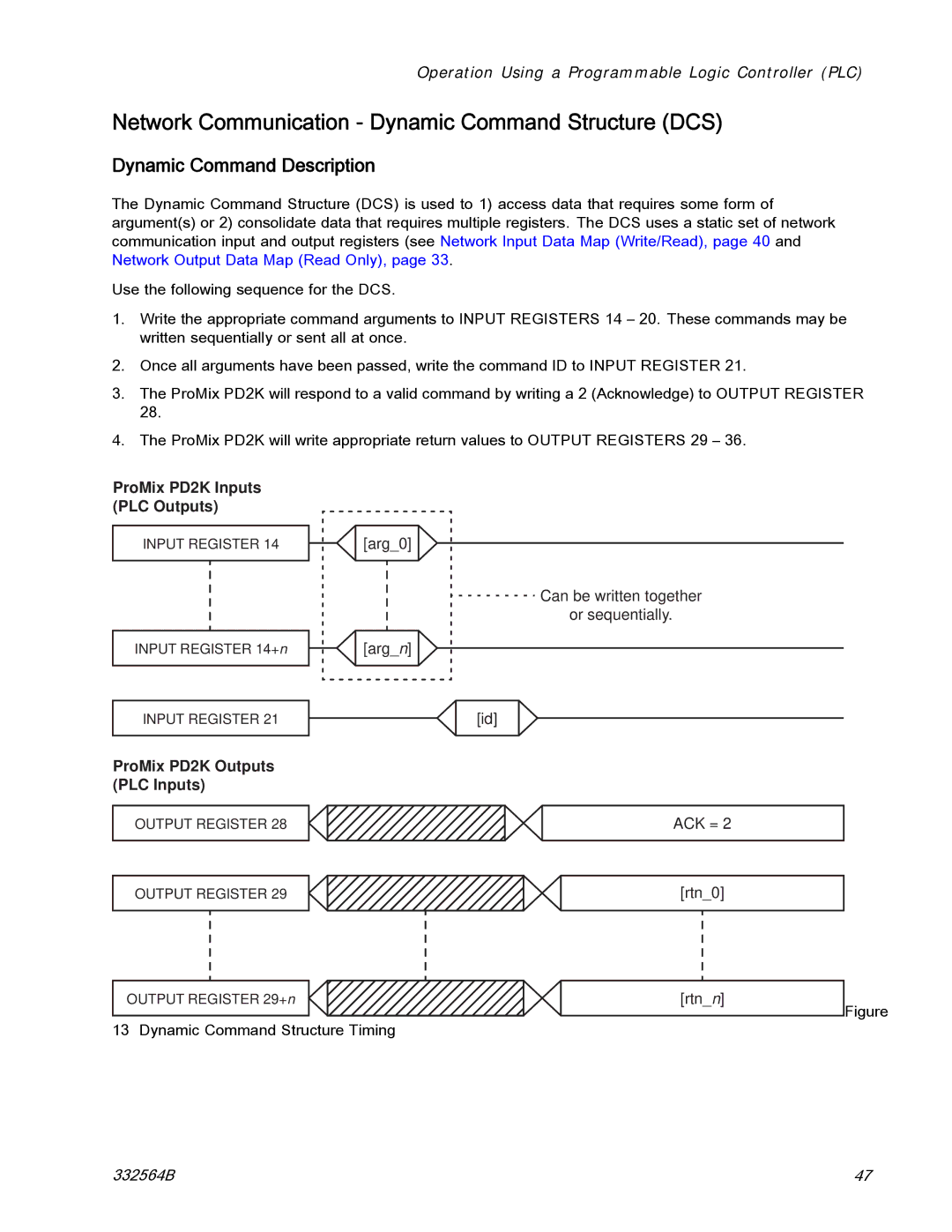
Dynamic Command Description
Network Communication Dynamic Command Structure DCS
DCS
List of DCS Commands
Dynamic Commands with Command ID
Write User ID
Write Recipe
Write Flush Sequence
Read User ID
Write Fluid Control Mode
Read Flush Sequence
Read Recipe
Read Fluid Control Mode
Yymmdd
Read Job Info
Example Ascii Character String Decode Algorithm
Read Alarm Info
Yymmdddw
Read Event Info
Flow Control System
Home Screen
Run Mode Screens
Opening Screen
See Advanced Screen 1, page 82, to set
Home Screen Key Description Details
Key Description
Key Description
Spray Screen
Spray Screen, in Standby Mode
Fill Screen, Color a Selected
Fill Screen
Usage Screen
Usage Screen
Events Screen
Errors Screen
Jobs Screen
Password Screen
Setup Mode Screens
System Screen
Mix Pressure Tolerance
Mix Idle Timeout
Mix No Flow Timeout
Low Flow Timeout
Hose Length and Diameter
Gun Hose Length
Gun Hose Diameter
Mix At Wall
Gateway ID
Enable
Manual Override
Gun Trigger Signal
Flow Control Setpoint Signal
Fluid Control
Recipe Screen
Flush Screen
Pump Screen
Default Settings Not Selected
Default Settings Selected
Pump Screen 3, Pressure Monitoring Disabled
Pressure Alarm and Deviation Limits
Calibrate Screen
Calibration Screens
Volume Check Screen
Enter Measured Volume of Solvent
Maintenance Screen
Maintenance Screens
Maintenance Screen 4, Color Valve Resets
Advanced Screen
Download Depth
Enable USB Downloads/Uploads
Log 90% Full Advisory Enabled
Display Units
Perform the pressure check
Calibration Checks
Pump Pressure Check
Pump Volume Check
Scroll to Calibrate Screen 3,
Solvent Meter Calibration
Multiple Color Systems
Color Change
Single Color Systems
Gun Trigger Input Function
System Errors
To Clear Error and Restart
Mix Errors Code Type Description Problem Cause Solution
Error Codes
Purge Errors Code Type Description Problem Cause Solution
Pumping Errors Code Type Description Problem Cause Solution
EBH#
Code Type Description Problem Cause Solution
SAD1
Pressure Errors Code Type Description Problem Cause Solution
Qbdx
Qadx
CAC#
System Errors Code Type Description Problem Cause Solution
Emix
CA0X
Cddx
Cagx
CDC#
USB Errors Code Type Description Problem Cause Solution
Wxuu
Wxud
USB
B9SX
B9AX
B9BX
ENT#
Calibration Errors Code Type Name Description
END#
ENS0
Code Type Name Description
Maintenance Errors
Flushing
Maintenance
Preventive Maintenance Schedule
Cleaning the ADM
Positive Displacement Metric Proportioner
Technical Data
For Graco Canada Customers
Graco Standard Warranty
Graco Information