Chapter 10. Advanced functions
Example
Rated frequency= 60Hz
Rated motor RPM= 1740rpm
Motor pole number= 4
fs = 60 | ⎛ 1740 ⋅ 4 ⎞ | = 2Hz | ||
− ⎜ | 120 | ⎟ | ||
| ⎝ | ⎠ |
| |
H32- [Rated slip frequency] is 2Hz. Set H32- [Rated slip frequency] to 2. H33: Enter the motor nameplate rated current
H34: Enter the measured current when the motor is running at rated frequency after the load is removed. Enter 50% of the rated motor current when it is difficult to measure the motor no load current.
H36: Enter motor efficiency on the nameplate.
H37: Select load inertia based on motor inertia as shown below.
H37
[Load inertia rate]
0Less than 10 times motor inertia
1About 10 times motor inertia
2Greater than 10 times motor inertia
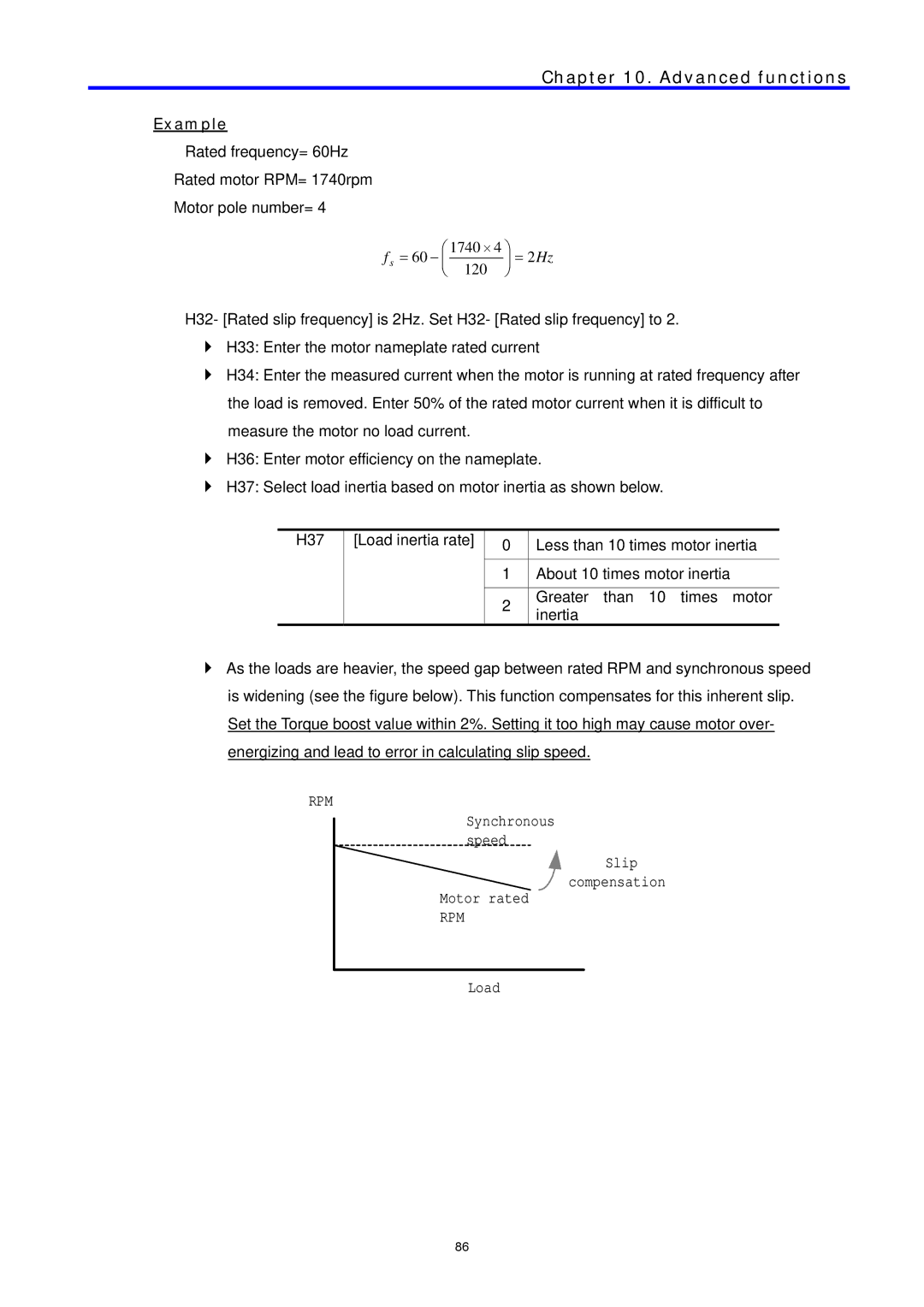
As the loads are heavier, the speed gap between rated RPM and synchronous speed is widening (see the figure below). This function compensates for this inherent slip. Set the Torque boost value within 2%. Setting it too high may cause motor over- energizing and lead to error in calculating slip speed.
RPM
Synchronous |
speed |
Slip |
compensation |
Motor rated |
RPM |
Load |
86