Chapter 10. Advanced functions
10.7 PID Control
| Group |
|
| LED Display |
|
| Parameter Name |
|
| Set |
|
|
| Min/Max |
|
| Factory |
|
| Unit |
| ||
|
|
|
|
|
|
| value |
|
|
| Range |
|
| Defaults |
|
|
| ||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||
Function |
| H40 |
|
| [Control mode select] |
|
| 2 |
| 0/3 |
| 0 |
| - |
| ||||||||
group 2 |
|
|
|
|
|
|
|
|
| ||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||
| H50 |
| [PID Feedback select] | - |
| 0/1 |
| 0 |
| - |
| ||||||||||||
|
|
|
|
|
|
|
|
| |||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
| |||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||
|
|
|
| H51 |
| [P gain for PID controller] | - |
| 0/999.9 |
| 300.0 |
| % |
| |||||||||
|
|
|
|
|
|
|
|
|
|
|
|
| |||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
|
|
|
| H52 |
| [Integral time | for | PID | - |
| 0.1/32.0 |
| 300 |
|
| Sec | |||||||
|
|
|
|
| controller (I gain)] |
|
|
|
|
|
| ||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||
|
|
|
| H53 |
| [Differential time for | PID | - |
| 0.0/30.0 |
| 0 |
|
| Sec | ||||||||
|
|
|
|
| controller (D gain)] |
|
|
|
|
|
| ||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||
|
|
|
| H54 |
| [F gain for PID controller] |
|
|
| 0/999.9 |
| 0 |
| % |
| ||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||
|
|
|
| H55 |
| [PID output | frequency | - |
| 0/400 |
| 60.0 |
|
| Hz | ||||||||
|
|
|
|
| limit] |
|
|
|
|
|
|
| |||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
|
|
|
| I20~24 |
|
| input | 21 |
| 0/24 |
| - |
| - |
| ||||||||
|
|
|
|
| terminal |
|
|
|
| ||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||
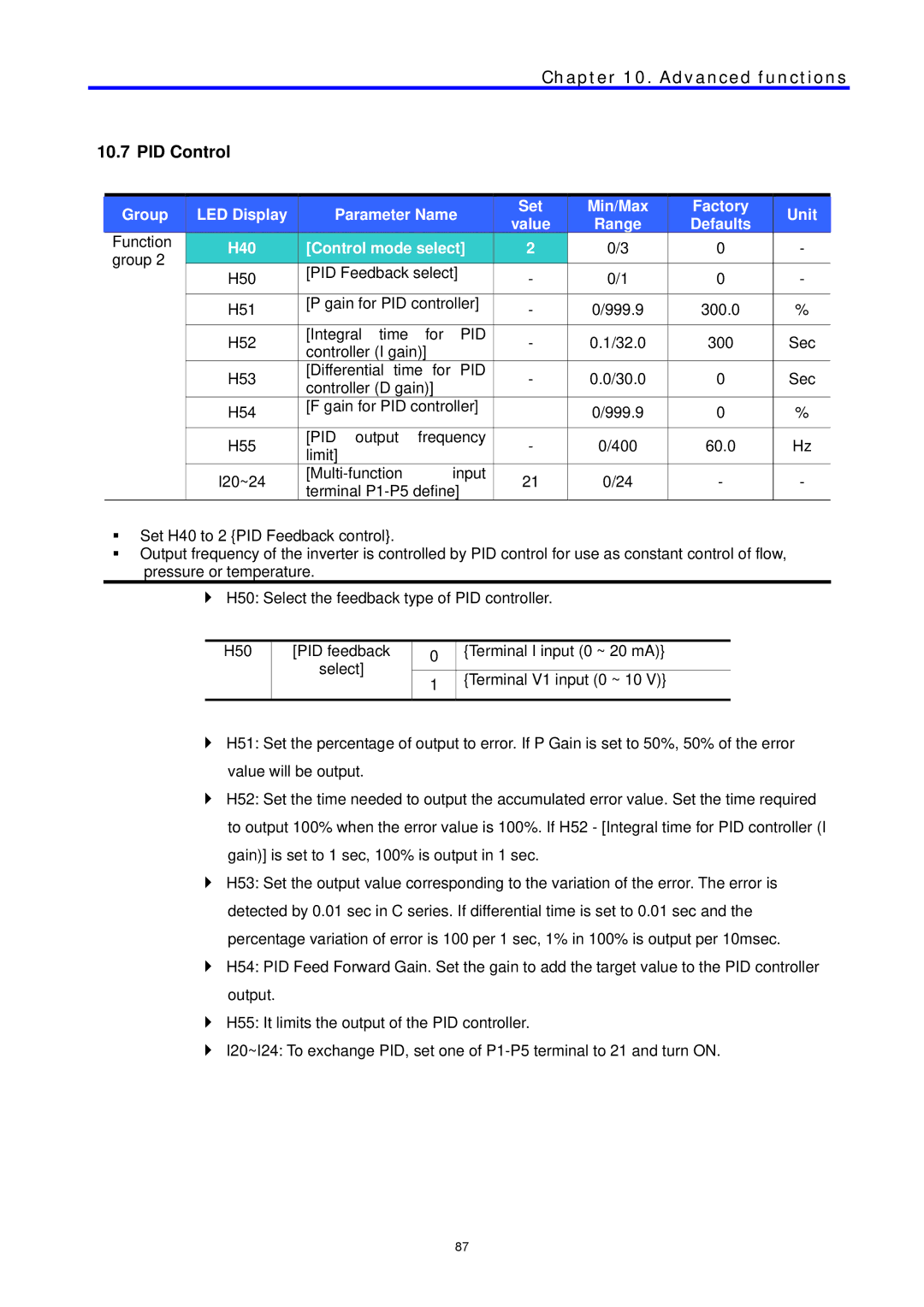
Set H40 to 2 {PID Feedback control}.
Output frequency of the inverter is controlled by PID control for use as constant control of flow, pressure or temperature.
H50: Select the feedback type of PID controller.
H50
[PID feedback
select]
0{Terminal I input (0 ~ 20 mA)}
1{Terminal V1 input (0 ~ 10 V)}
H51: Set the percentage of output to error. If P Gain is set to 50%, 50% of the error value will be output.
H52: Set the time needed to output the accumulated error value. Set the time required to output 100% when the error value is 100%. If H52 - [Integral time for PID controller (I gain)] is set to 1 sec, 100% is output in 1 sec.
H53: Set the output value corresponding to the variation of the error. The error is detected by 0.01 sec in C series. If differential time is set to 0.01 sec and the percentage variation of error is 100 per 1 sec, 1% in 100% is output per 10msec. H54: PID Feed Forward Gain. Set the gain to add the target value to the PID controller output.
H55: It limits the output of the PID controller.
I20~I24: To exchange PID, set one of
87