General Description
Block Diagram
MAY
National Semiconductor Corporation
Table of Contents
Features
Device Overview
Can Interface
Bluetooth LLC
Quad Uart
Advanced Audio Interface
ACCESS.BUS Interface
MICROWIRE/SPI
MULTI-FUNCTION Timer
Versatile Timer Unit
DMA Controller
Power Management
Serial Debug Interface
Development Support
CP3BT26
Signal Descriptions
LQFP-128
LQFP-144
X1CKI
Reset
Bbclk
X1CKO
Name Pins Primary Function Alternate Alternate Function
Sdat
PG4
PG5
PG6
X1CKI
WR0
Selio
WR1
CTS PE4
SLE
CPU Architecture
GENERAL-PURPOSE Registers
Dedicated Address Registers
Interrupt Base Register Intbase
Processor Status Register PSR
12 11 Reserved
No carry or borrow occurred Carry or borrow occurred
When the IDT has 16-bit entries, and all ex
Configuration Register CFG
Mode for the CR16B large model.
Is held in the Intbase register, which is not
Addressing Modes
Addb R1, R2
Loadw 12R5, R6
Instruction SET
Stacks
Instruction Set Summary Mnemonic Operands Description
Lshd
Ashud
Tbit
LPR
Push
Retx
POP
Popret
Eiwait
Stormp
NOP
Wait
Memory
Operating Environment
IN/A
BUS Cycles
BUS Interface Unit BIU
BIU Control Registers
Empty
Static Zone 0 Configuration Register SZCFG0
2 I/O Zone Configuration Register Iocfg
Static Zone 1 Configuration Register SZCFG1
Static Zone 2 Configuration Register SZCFG2
WBR RBE Hold Wait Ipst
Wait and Hold States
Access to Peripherals
Flash Program/Data Memory
RAM Memory
System Configuration Registers
Module Configuration Register Mcfg
System Configuration Registers Name Address Description
Module Status Register Mstat
Software Reset Register Swreset
Flash Memory
Flash Memory Protection
Flash Memory Organization
Flash Memory Operations
Main Block Module Erase
Main Block Page Erase
Information Block Module Erase
Main Block Write
Boot
Information Block Words
Area
Boot Area Start-Up Operation
CPU Reset Behavior
Flash Memory Interface Registers
Empty Ispe
Flash Memory 1 Write Enable Register FM1WER
Flash Memory 0 Write Enable Register FM0WER/FSM0WER
Flash Memory Information Block Data Register
FMIBDR/FSMIBDR
Flash Data Memory 0 Write Enable Register FSM0WER
Flash Memory Control Register Fmctrl
Fsmctrl
Fsmstat
Fsmpsr
FMSTART/FSMSTART
Flash Memory End Time Reload Register FMEND/FSMEND
FMRCV/FSMRCV FSMAR1
Flash Memory Auto-Read Register 0 FMAR0/ FSMAR0
Flash Memory Auto-Read Register 2 FMAR2/ FSMAR2
Channel Assignment
DMA Controller
Transfer Types
DMA Channel Assignment Peripheral Trans Register Action
Operation Modes
Debug Mode
Software DMA Request
DMA Controller Register SET
Device a Address Register ADRAn
Device a Address Counter Register ADCAn
Device B Address Counter Register ADCBn
Device B Address Register ADRBn
DMA Control Register DMACNTLn
Block Length Register BLTRn
DMA Status Register Dmastat
VLD Chac OVR
VLD
NON-MASKABLE Interrupts
Interrupts
Maskable Interrupts
Interrupt Controller Registers
Interrupt Vector Register Ivct
External NMI Trap Control and Status Register Exnmi
Non-Maskable Interrupt Status Register Nmistat
Interrupt Enable and Mask Register 2 IENAM2
Interrupt Enable and Mask Register 1 IENAM1
Interrupt Status Register 1 ISTAT1
Interrupt Status Register 2 ISTAT2
Nested Interrupts
Maskable Interrupt Sources
Maskable Interrupts Assignment IRQ Number Description
IRQ Number Description
Triple Clock and Reset Module
Triple Clock and Reset
Crystal Resonance Frequency
External Crystal Network
Type
Capacitor C1, C2 Capacitance
Slow Clock
Main Clock
PLL Clock
Min. Q factor
External Reset
POWER-ON Reset
Clock and Reset Registers
System Clock
MODE20
Active Mode
Power Management
Power Save Mode
Module Activity Summary Power Mode Clock
Halt Mode
Idle Mode Power Management Registers
Power Management Registers Name Address Description
Power Management Control Register Pmmcr
DHC
Hccm
Hcch
Active Mode to Power Save Mode
OHC OMC OLC
OHC
Entering Halt Mode
Entering Idle Mode
Software-Controlled Transition to Active Mode
Wake-Up Transition to Active Mode
Multi-Input Wake-Up
Multi-Input Wake-Up Module Block Diagram
Miwu Sources
MULTI-INPUT WAKE-UP Registers
Miwu Channel
Multi-Input Wake-Up Registers Name Address Description
Wake-Up 1 Interrupt Enable Register WK1IENA
Wake-Up Interrupt Enable Register WK0IENA
Wake-Up Enable Register WK0ENA
Wake-Up 1 Edge Detection Register WK1EDG
WK0ICTL1 WK0ICTL2
Wake-Up Interrupt Control Register
Wake-Up 1 Interrupt Control Register
WK1ICTL1 WK1ICTL2
Wake-Up Pending Clear Register WK0PCL
Wake-Up Pending Register WK0PND
Wake-Up 1 Pending Register WK1PND
Wake-Up 1 Pending Clear Register WK1PCL
Programming Procedures
Port Registers
Input/Output Ports
Address Description
Port Registers
Port Data Input Register PxDIN
Port Alternate Function Register PxALT
Port Data Output Register PxDOUT
Port Direction Register PxDIR
Port Alternate Function Select Register PxALTS
Port High Drive Strength Register PxHDRV
Alternate Function Select
Port Pin PxALTS =
OPEN-DRAIN Operation
RF Interface
Bluetooth Controller
X1CKI/BBCLK
Rfdata
Rfce
Serial Interface
Sclk
Sdat
Serial Interface Write Timing Read Operation
Write Operation
First part of read cycle driven by CP3BT26. Address is 0Ah
Bit, and register address for a read cycle. In the second
15.4 LMX5252 POWER-UP Sequence
15.3 LMX5251 POWER-UP Sequence
Bluetooth Sleep Mode
Bluetooth Global Registers
Bluetooth Sequencer RAM
Bluetooth Shared Data RAM
16.0 12-Bit Analog to Digital Converter
Functional Description
Data Path
ADC Clock Generation
Operation
ADC Voltage References
Pen-Down Detector
Touchscreen Interface
Touchscreen Driver Configuration
RX2
Measuring Pen Force
RY2
RYP
Freeze
ADC Operation in POWER-SAVING Modes
ADC Register SET
ADC Registers Name Address Description
Touchcfg ADC0/TSX+ ADC1/TSY+ ADC2/TSX ADC3/TSY
Muxcfg
Prefcfg
Nrefcfg
Clkdiv
ADC Start Conversion Delay Register Adcscdly
ADC Conversion Control Register Adccntrl
ADC Start Conversion Register Adcstart
Adcresult
ADC Result Register Adcreslt
Adcoflw
Sign
Random Number Generator RNG
RNG Module Block Diagram
Random Number Generator Register SET
Functional States
USB Controller
TX Fifo RX Fifo
Endpoint Operation
Transmit Endpoint Fifo Operation TXFIFO1, TXFIFO2, TXFIFO3
Bidirectional Control Endpoint FIFO0 Operation
USB Controller Registers
Receive Endpoint Fifo Operation RXFIFO1, RXFIFO2, RXFIFO3
USB Controller Registers Name Address Description
Main Control Register Mcntrl
NFS
Node Functional State Register Nfsr
USB Functional States
NFS
Main Event Register Maev
Main Mask Register Mamsk
Alternate Event Register Altev
Alternate Mask Register Altmsk
Transmit Event Register Txev
Transmit Mask Register Txmsk
Receive Event Register Rxev NAK Event Register Nakev
Receive Mask Register Rxmsk
NAK Mask Register Nakmsk
Fifo Warning Event Register Fwev
Frame Number High Byte Register FNH
Fifo Warning Mask Register Fwmsk
Dsrc
DMA Event Register Dmaev
DMA Mask Register Dmamsk
DMA Error Register Dmaerr
Mirror Register MIR
DMA Count Register Dmacnt
Transmit Command 0 Register TXC0
Endpoint Control 0 Register EPC0
Transmit Status 0 Register TXS0
Receive Command 0 Register RXC0
Transmit Data 0 Register TXD0
Receive Status 0 Register RXS0
Receive Data 0 Register RXD0
Endpoint Control Register n EPCn
Transmit Status Register n TXSn
Tfwl
Transmit Command Register n TXCn
Last
RFF
Receive Status Register n RXSn
Transmit Fifo Warning Limit
Tfwl
Bytes Remaining in Fifo
Transceiver Interface
Receive Command Register n RXCn Receive Data Register n RXD
Receive Fifo Warning Limit
Rfwl
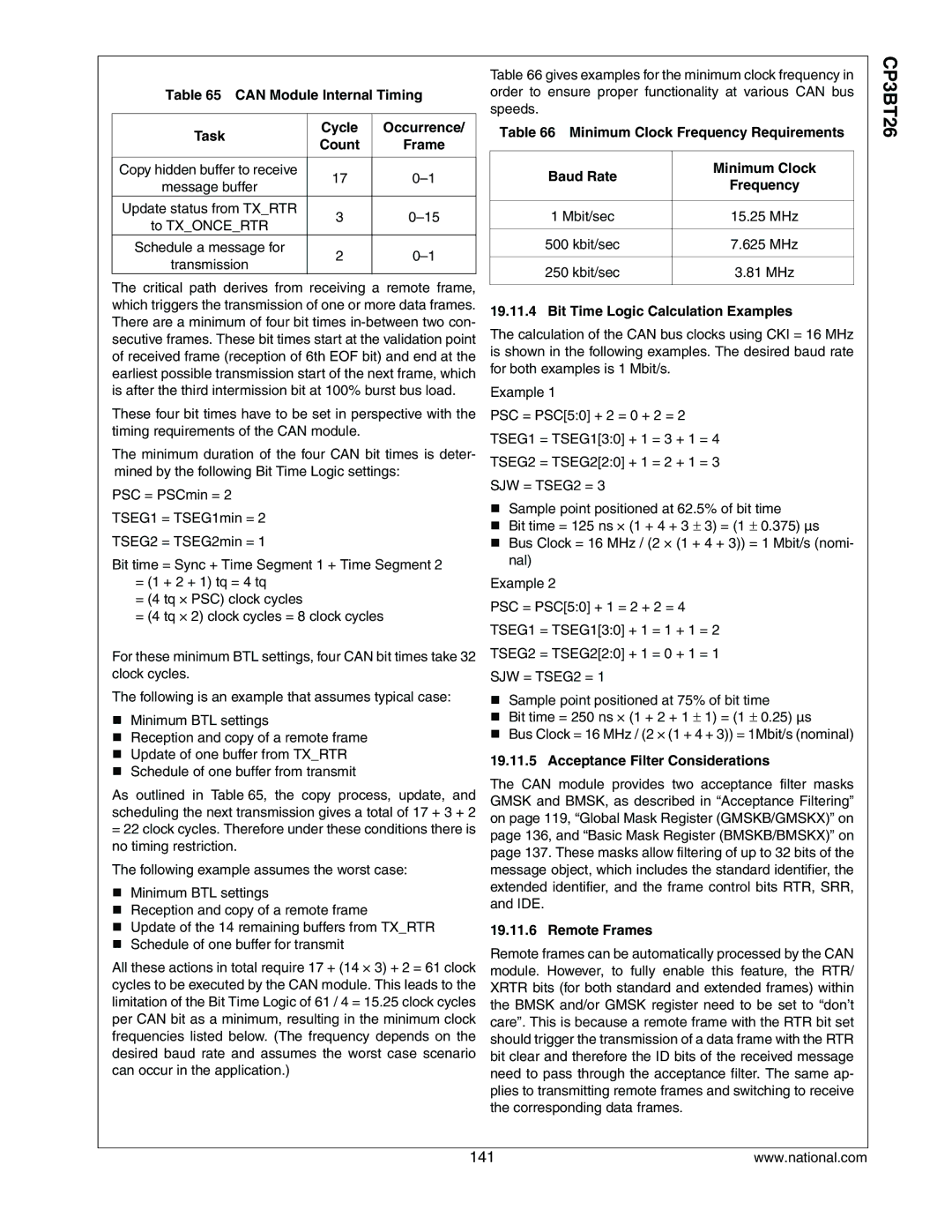
Can Module
Basic can Concepts
Can Block Diagram
Can Frame Fields
Can Frame Types
Start of Frame SOF
Arbitration Field
Data Field
Data Length Code DLC
Cyclic Redundancy Check CRC
ACK Field
Remote Frame
Data Field
Cyclic Redundancy Check Field CRC
Error Frame Overload Frame
Error Frame
Form Error
Stuff Error
Bit CRC Error
Acknowledgment Error
Error Warning
Error Active
Error Passive
Error Counters
Can Bit Time
Bit Time Logic
Synchronization
Bit Timing
CKI
Message Transfer
Example 1 Acceptance of a Single Identifier
Acceptance Filtering
Two 32-bit masks are used to filter unwanted messages
From the can bus Gmask and BMASK. shows
120
Receive Structure
Receive Timing
Receive Procedure
Writing to Buffer Status Code During
Rxbusy
122
Buffer Read Routine Bufflock Enabled
Transmit Structure
Transmit Scheduling
Transmit Priority
PRI
Txpri
TX Buffer States
Interrupts
IRQ IST3 IST2 IST1 IST0
Time Stamp Counter
Memory Organization
CPU Access to can Registers/Memory
Message Buffer Organization
Message Buffer Map Address Register
Can Controller Registers
Can Controller Registers Name Address Description
Buffer Status/Control Register Cnstat
Buffer Status Section of the Cnstat Register
ST3 DIR ST2 ST1 ST0 Busy
Buffer Status
DLC
Data Length Coding
Storage of Standard Messages
Standard Frame with 8 Data Bytes Address Buffer Register
Extended Messages with 8 Data Bytes Address Buffer Register
Cnstat DLC
PRI SRR
Contents of these registers are ignored. If a remote
Frame is received, the contents of these registers will be
Storage of Remote Messages
Extended Remote Frame Address Buffer Register
Can Global Configuration Register Cgcr
When the Ignore Acknowledge bit is set,
Listen Only bit can be used to configure
When the Loopback bit is set, all messages
Dress, as shown in Figure
SJW
TSEG2
TSEG1
RTR IDE
Xrtr
Basic Mask Register BMSKB/BMSKX
Can Interrupt Enable Register Cien
Basic Mask BM2818
BM170
IRQ
Can Error Diagnostic Register Cediag
Can Error Counter Register Canec
Error Field Identifier
EFID30
External can Pins Signal Name Type Description
Can Timer Register Ctmr
System START-UP and MULTI-INPUT WAKE-UP
External Connection
Bit Time Logic Calculation Examples
Minimum Clock Frequency Requirements Baud Rate
Acceptance Filter Considerations
Remote Frames
Usage Hint
Audio Interface Signals
Advanced Audio Interface
Audio Interface Modes
Synchronous Mode
Normal Mode
DMA Support
145
Frame Clock Generation
Clock Configuration
BIT Clock Generation
Audio Interface Operation
DMA Operation
Transmit
Fifo Operation
Receive
Frame Sync Signal
Communication Options
Data Word Length
Short and Long Frame Sync Pulses
Audio Control Data
IOM-2 Mode
Loopback Mode
150
Freeze Mode
Audio Interface Registers
Audio Interface Registers Name Address Description
Audio Transmit Fifo Register Atfr
Audio Receive Fifo Register Arfr
Audio Receive DMA Register n ARDRn
Audio Transmit DMA Register n ATDRn
Slots per Mode Frame
Audio Global Configuration Register Agcr
SCS
FSL
Txeip Txip Rxeip Rxip Txeie Txie Rxeie Rxie
Audio Interrupt Status and Control Register Aiscr
Txeic Txic Rxeic Rxic Rxie
Txeip
Rxsa Bit Slots Enabled
Rxdsa Bit Slots Enabled For DMA
Audio Receive Status and Control Register Arscr
Txsa Bit Slots Enabled
Txdsa Bit Slots Enabled For DMA
Audio Transmit Status and Control Register Atscr
Audio DMA Control Register Admacr
Audio Clock Control Register Accr
RMD
DMA Request Condition
CVSD/PCM Conversion Module
Operation
PCM Conversions
PCM to Cvsd Conversion
Cvsd Conversion
Cvsd to PCM Conversion
Interrupt Generation
CVSD/PCM Converter Registers
Linearout
Cvsd Status Register Cvstat
Uart Modules
Functional Overview
Uart Operation
Uart Asynchronous Communication
Uart Block Diagram
Frame Format Selection
Diagnostic Mode
Prescaler Factor
Prescaler Factors
Parity Generation and Detection
Break Generation and Detection
Uart Registers Name Address Description
Uart Registers
Uart Receive Data Buffer UnRBUF
Uart Baud Rate Divisor UnBAUD
Uart Transmit Data Buffer UnTBUF
Uart Frame Select Register UnFRS
Uart Status Register UnSTAT
Uart Mode Select Register 1 UnMDSL1
Uart Oversample Rate Register UnOVR
Uart Interrupt Control Register UnICTRL
UOVSR30
Oversampling Rate
Baud Rate Calculations
Uart Mode Select Register 2 UnMDSL2
Uart Sample Position Register UnSPOS
Oversampling Rate Sample Position
173
174
Microwire Operation
Microwire/SPI Interface
Microwire Interface
Shifting
Clocking Modes
Writing
Normal Mode Scidl =
Master Mode
Slave Mode
Microwire Interrupt Trigger Condition Status Enable Bit
MWCTRL1
Mwen
Microwire Interface Registers
SCM
Microwire Status Register Mwstat
Scdv
OVR RBF BSY
ACB Protocol Overview
ACCESS.bus Interface
Data Transactions
Start and Stop
Acknowledge Cycle
Addressing Transfer Formats
Arbitration on the Bus
ACB Functional Description
Bus Idle Error Recovery
Master Error Detections
Slave Mode
Slave Error Detections
ACCESS.BUS Interface Registers
ACB Control Status Register Acbcst
ACB Control Register 1 ACBCTL1
Tgscl
Start
Stop
ACB Control Register 3 ACBCTL3
ACB Control Register 2 ACBCTL2
ACB Own Address Register 1 ACBADDR1
Usage Hints
Saen Addr
Saen
190
Avoiding Bus Error During Write Transaction
191
Timer T0 Operation
Timing and Watchdog Module
TWM Structure
Watchdog Operation
Power Save Mode Operation
TWM Registers
Register Locking
T0IN
Mdiv
Watchdog Service Data Match Register Wdsdm
Watchdog Programming Procedure
TWMT0 Control and Status Register T0CSR
Watchdog Count Register Wdcnt
Timer Structure
Multi-Function Timer
Clock Source Block
196
Pulse Accumulate Mode
Timer Operating Modes
Limitations in Low-Power Modes
Counter Clock Source Select
198
Mode 1 Processor-Independent PWM
Dual-Input Capture Mode
Mode 2 Dual Input Capture
200
Mode 3 Dual Independent Timer/Counter
Input Capture Plus Timer Mode
Mode 4 Input Capture Plus Timer
Timer I/O Functions
Timer Interrupts
Taen
Tben
Timer Registers
Timer Mode Control Register Tctrl
Reload/Capture a Register Tcra
Reload/Capture B Register Tcrb
Timer Interrupt Clear Register Ticlr
Timer Interrupt Control Register Tictl
Versatile Timer Unit VTU
VTU Functional Description
206
VTU PWM Generation
Dual 8-bit PWM Mode
208
VTU 16-bit PWM Mode Dual 16-Bit Capture Mode
ISE Mode operation
VTU Dual 16-bit Capture Mode Low Power Mode
Mode Control Register Mode
VTU Registers
VTU Registers Name Address Description
Interrupt Control Register Intctl
CxEDG Capture Counter Reset
Clock Prescaler Register 1 CLK1PS
Interrupt Pending Register Intpnd
Clock Prescaler Register 2 CLK2PS
CNTx
Counter Register n COUNTx
Duty Cycle/Capture Register n DTYCAPx
Period/Capture Register n PERCAPx
Register Map
Bluetooth LLC Registers
USB Node Registers
Register Name Size Address Access Value After Comments Type
TXC1
EPC1
EPC2
EPC4
Can Module Message Buffers
DMA Controller
Can Registers
Bus Interface Unit
System Configuration
Flash Program Memory Interface
Flash Data Memory Interface
CVSD/PCM Converter
Triple Clock + Reset
General-Purpose I/O Ports
Multi-Input Wake-Up
Comments Type
Register Name Size Address
Interrupt Control Unit
Advanced Audio Interface
UART1
UART0
UART3
UART2
ACCESS.bus
Multi-Function Timer
Timing and Watchdog
ADC
Versatile Timer Unit
Rngcst
RNG
Rngd
Word FF F284h
Register Bit Fields
USB
IGN Ignout Rxen Setup EPC1
Setup Toggle Rxlast Rcount RXC0
Nakev OUT Nakmsk Fwev RXWARN31
Fwmsk RXWARN31
Control Status
Can
Dmac
Memory Registers
BIU
System Configuration Registers
TBI Register
Flash
Flash Data Memory
CLK3RES
CVSD/PCM
MIWU16
PMM Register
Gpio Registers
AAI
Uart
ICU Registers
MWSPI16
ACB Registers
MFT16
VTU
Imsk
Rngcst
Rngd
Rngdivh
Symbol Parameter Conditions Min Max Units
Electrical Characteristics
Absolute Maximum Ratings
TBD
IOOff
INL
Symbol Parameter Conditions Min Typ Max Units
LSB
DNL
Flash Memory ON-CHIP Programming
Clock and Reset Timing
Output Signal Levels
Reset and NMI Input Signals
TRI-STATE
Clock Timing
NMI Signal Timing
Uart Timing
Uart Output Signals
30.9 I/O Port Timing
Port Output Signals
Advanced Audio Interface AAI Timing
AAI Output Signals
Receive Timing, Long Frame Sync
Transmit Timing, Short Frame Sync
Microwire/SPI Signals Symbol Description Reference Min ns
MICROWIRE/SPI Timing
Microwire/SPI Input Signals
Microwire/SPI Output Signals
Microwire Data Out Valid
Normal Mode After FE on
Alternate Mode After RE On MSK Propagation Time
254
255
256
Microwire Transaction Timing, Alternate Mode, Scidl =
257
ACCESS.bus Output Signals
ACCESS.BUS Timing
259
260
ACB Data Timing
MULTI-FUNCTION Timer MFT Timing
USB Port AC Characteristics
TIOx Input High Time Rising Edge RE on CLK
Versatile Timing Unit VTU Timing
TIOx Input Low Time RE on CLK
262
External BUS Timing
External Bus Output Signals
264
Early Write Between Normal Read Cycles No Wait States
265
266
Consecutive Normal Read Cycles Burst, No Wait States
267
268
Early Write Between Fast Read Cycles
LQFP-128 Package
Pin Assignments
PWR
X1CKO X1CKI
Avcc PWR Adgnd Advcc Uvcc
Reset TMS
X2CKI X2CKO ENV2
SDA ADC0 TSX+
SRFS/NMI
PE0 RXD0 Gpio PE1 TXD0 PE2 RTS PE3 CTS PE4 CKX/TB PE5
PF0 MSK/TIO1
PF1 MDIDO/TIO2
272
LQFP-144 Package
ADC4 MUXOUT0
SCL SDA ADC0 TSX+
ADC5 MUXOUT1
ADC7 Adcin
Pin Name Alternate Functions Pin Number Type
A12
A22 A21 A20 A19 A18 A17 A16 A15 A14 A13
A11
A10
Revision History
Revision History
Date Major Changes From Previous Version
LQFP-128 Package LQFP-144 Package
Physical Dimensions millimeters unless otherwise noted
Form when properly used in accordance with instructions
Life Support Policy
Banned Substance Compliance