TMS320C6727, TMS320C6726, TMS320C6722 DSPs
Features
Description
Submit Documentation Feedback
Device Compatibility
Functional Block Diagram
Package Thermal Resistance Characteristics
Contents
C6726
Device Characteristics
Characteristics of the C672x Processors
Hardware Features
CPU Data Paths
Enhanced C67x+ CPU
Instruction FLOATING-POINT Improves Operation
CPU Interrupt Assignments
New Floating-Point Instructions for C67x+ CPU
CPU Interrupt Assignments
Byte Bank
Internal Program/Data ROM and RAM
Register Name Byte Address Description
Cache Mode
Program Cache
Program Cache Control Registers
Block Diagram of Crossbar Switch
High-Performance Crossbar Switch
Label Bridge Description Master Clock Target Clock
Bus Bridges
Csprst
BIT no Name Reset Value Read Write Description
Ffff
Memory Map Summary
C672x Memory Map
SPI0SIMO SPI0CLK
Boot Modes
Required Boot Pin Settings at Device Reset
Boot Mode Uhpihcs
PINCAP7
BIT no Name Description
PINCAP15
Pin Maps
Pin Assignments
Pin Low-Profile Quad Flatpack RFP Suffix-Top View
ZDH
Signal Name RFP GDH
Terminal Functions
12. Terminal Functions
IO/I IPD
Description ZDH
AHCLKX0/AHCLKX2
AHCLKR0/AHCLKR1
ACLKR0
AFSR0
Power Pins 144-Pin RFP Package
Power Pins 256-Terminal GDH/ZDH Package
Device Support
Development
Development Support
Package Type ‡ §
TMS 320 C6727 GDH a 250
Prefix Device Speed Range
Device Family
Documentation Support
C672x devices are documented in the tools v6.0 documentation
Peripheral Pin Multiplexing Options
Device Configuration Registers
Device-Level Configuration Registers
Options for Configuring SPI0, I2C0, and I2C1
Peripheral Pin Multiplexing Control
Options for Configuring SPI1, McASP0, and McASP1 Data Pins
Options for Configuring Emif and Uhpi C6727 Only
Configuration Option Peripheral
PIN First Priority Second Priority Third Priority
Priority of Control of Data Output on Multiplexed Pins
Unit
Electrical Specifications
Absolute Maximum Ratings1
Recommended Operating Conditions1
GDH, CV
Parameter Test Conditions MIN TYP MAX Unit
Dvdd
II, IOZ
Tester Pin Electronics
Parameter Information
Parameter Information Device-Specific Information
Timing Parameter Symbology
Power-Supply Decoupling
Power Supplies
Power-Supply Sequencing
MIN MAX Unit
Reset
Reset Electrical Data/Timing
Reset Timing Requirements
DMAX Device-Specific Information
Dual Data Movement Accelerator dMAX
REQ RAM
DMAX
RAM
REQ
Submit Documentation Feedback
Event Number Event Acronym Event Description
DMAX Peripheral Event Input Assignments
Byte Address Register Name Description
DMAX Configuration Registers
DMAX Peripheral Registers Descriptions
External Interrupts
Emif Device-Specific Information
External Memory Interface Emif
Emwe
Reset
DSP Emif
Emras
EMWEDQM1
Emcas
Emclk
EMWEDQM0
Emif Registers
Emif Peripheral Registers Descriptions
Parameter MIN MAX Unit
Emif Sdram Interface Switching Characteristics
Emif Electrical Data/Timing
Emif Sdram Interface Timing Requirements
Emif Asynchronous Interface Timing Requirements1
Emif Asynchronous Interface Switching Characteristics1
Basic Sdram Read Operation
Basic Sdram Write Operation Emclk
Emras Emcas Emwe
10. Asynchronous Read Select Strobe Mode
Asynchronous Read WE Strobe Mode
12. Asynchronous Write Select Strobe Mode
11. Asynchronous Write WE Strobe Mode
13. Emwait Timing Requirements
Uhpi Major Modes on C672x
10. HPI Access Types Selected by UHPIHCNTL10
Universal Host-Port Interface Uhpi C6727 Only
Uhpi Device-Specific Information
Uhpihrw UHPIHDS2G UHPIHDS1G Uhpihcs Uhpihrdy AMUTE2/HINT
DSP
UHPIHD16/HHWIL
Uhpihasb
External Host MCU AxyC D150 D16 D3117 BE30D
16. Uhpi Multiplexed Host Address/Data Fullword Mode
External Host MCU A172 AxyA D150 D16 D3117 BE30C
17. Uhpi Non-Multiplexed Host Address/Data Fullword Mode
Uhpi Internal Registers
11. Uhpi Configuration Registers
Device-Level Configuration Registers Controlling Uhpi
Uhpi Peripheral Registers Descriptions
Bytead Full Nmux Pagem ENA
BIT no Name Reset Read Description Value Write
Hpiaumb Description
BIT no Name Reset Read Value Write
318 Reserved
Hpiamsb Description
15. Uhpi Read and Write Timing Requirements1
Uhpi Electrical Data/Timing
Universal Host-Port Interface Uhpi Read and Write Timing
16. Uhpi Read and Write Switching Characteristics1
Valid Read data Write data
UHPIHDSx
Read Write UHPIHA150
Uhpihcs Uhpihas UHPIHCNTL10 Uhpihrw Uhpihhwil Hstrobe a
22. Multiplexed Read Timings Using Uhpihas
23. Multiplexed Read Timings With Uhpihas Held High
24. Multiplexed Write Timings With Uhpihas Held High
GIO
Multichannel Audio Serial Ports McASP0, McASP1, and McASP2
DIT Clock Pins Data Pins Comments
17. McASP Configurations on C672x DSP
McASP Internal Registers
Device-Level Configuration Registers Controlling McASP
McASP Peripheral Registers Descriptions
Register Byte Description Name Address
DITCSRA1
Xclkchk
Xevtctl
DITCSRA0
0x4500 020C XBUF3 Transmit buffer register for serializer
AMUTEIN0 Description
AMUTEIN0
313 Reserved
AMUTEIN1 Description
AMUTEIN1
AMUTEIN2
AMUTEIN2
22. McASP Timing Requirements1
McASP Electrical Data/Timing
Multichannel Audio Serial Port McASP Timing
23. McASP Switching Characteristics1
ACLKR/X Clkrp = Clkxp = 0A ACLKR/X Clkrp = Clkxp = 1B
29. McASP Input Timings
ACLKR/X Clkrp = Clkxp = 1A ACLKR/X Clkrp = Clkxp = 0B
30. McASP Output Timings
SPI Device-Specific Information
Serial Peripheral Interface Ports SPI0, SPI1
Slave SPI
SPIxSCS SPIxENA SPIxCLK SPIxSOMI SPIxSIMO
Master SPI
SPI0 SPI1 Register Name Description Byte Address
24. SPIx Configuration Registers
SPI Peripheral Registers Descriptions
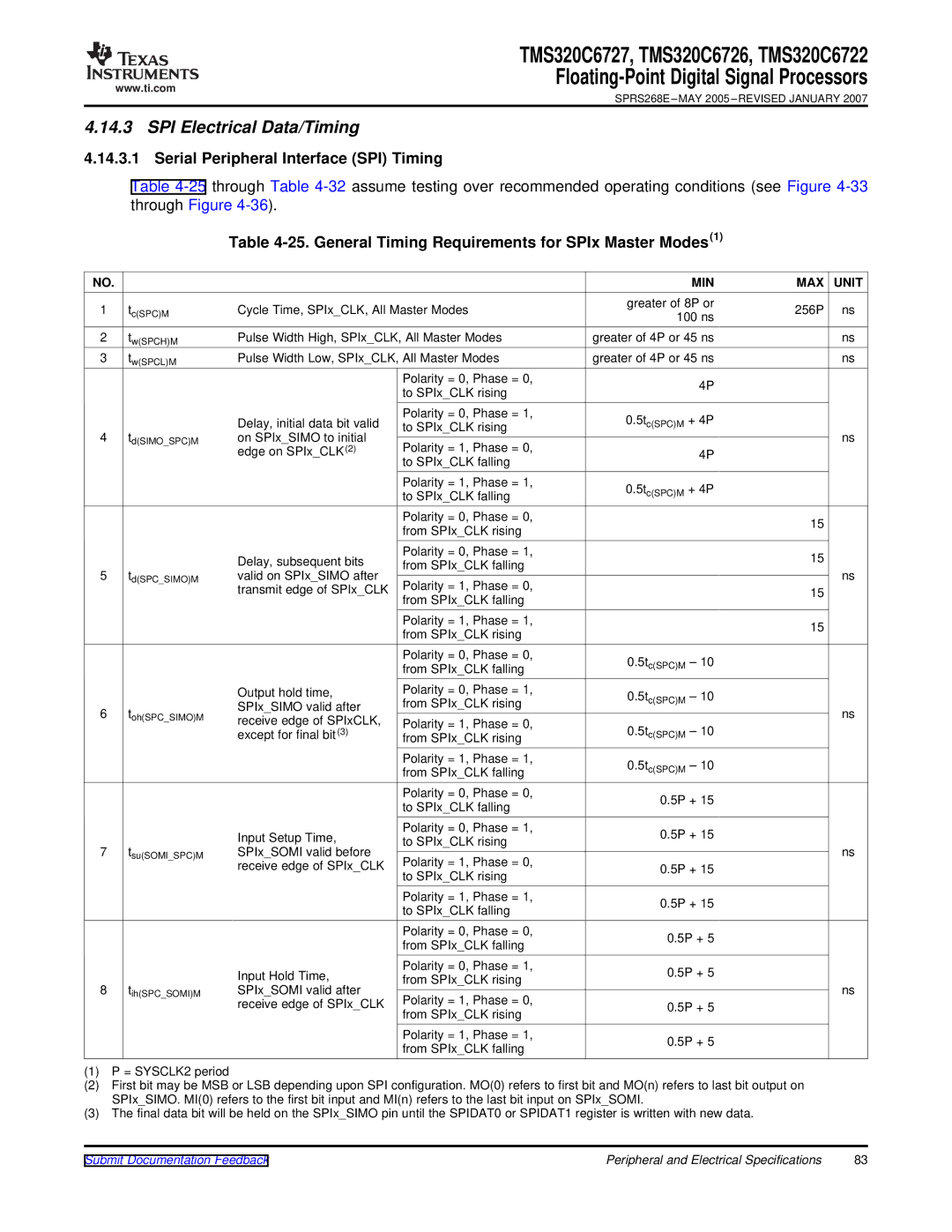
25. General Timing Requirements for SPIx Master Modes1
SPI Electrical Data/Timing
Serial Peripheral Interface SPI Timing
26. General Timing Requirements for SPIx Slave Modes1
MIN MAX Unit 2P
27. Additional1 SPI Master Timings, 4-Pin Enable Option2
29. Additional1 SPI Master Timings, 5-Pin Option2
31. Additional1 SPI Slave Timings, 4-Pin Chip Select Option2
30. Additional1 SPI Slave Timings, 4-Pin Enable Option2
32. Additional1 SPI Slave Timings, 5-Pin Option2
33. SPI Timings-Master Mode
34. SPI Timings-Slave Mode
35. SPI Timings-Master Mode 4-Pin and 5-Pin
36. SPI Timings-Slave Mode 4-Pin and 5-Pin
15.1 I2C Device-Specific Information
Inter-Integrated Circuit Serial Ports I2C0, I2C1
Register Name Description Byte Address
33. I2Cx Configuration Registers
15.2 I2C Peripheral Registers Descriptions
34. I2C Input Timing Requirements
35. I2C Switching Characteristics1
15.3 I2C Electrical Data/Timing
Inter-Integrated Circuit I2C Timing
I2CxSDA I2CxSCL Stop Start Repeated
35. I2C Switching Characteristics
Parameter
Watchdog Key Register Bit Key RTI Interrupt
Real-Time Interrupt RTI Timer With Digital Watchdog
16.1 RTI/Digital Watchdog Device-Specific Information
RTI Internal Registers
Device-Level Configuration Registers Controlling RTI
16.2 RTI/Digital Watchdog Registers Descriptions
36. RTI Registers
Rtiwdstatus
Rtiintflag
Rtidwdctrl
Rtidwdprld
38. Recommended On-Chip Oscillator Components
External Clock Input From Oscillator or Clkin Pin
39. Clkin Timing Requirements
Clock Electrical Data/Timing
PLL Device-Specific Information
Phase-Locked Loop PLL
EMI
Parameter Default Value Allowed Setting or Range
40. Allowed PLL Operating Conditions
Board
41. PLL Controller Registers
PLL Registers Descriptions
RTI
CODEC, DIR
ADC, DAC, DSD
Spio
ADDS/CHANGES/DELETES
Thermal Characteristics for RFP Package
Package Thermal Resistance Characteristics
Thermal Characteristics for GDH/ZDH Package
Standoff Height
Standoff Height
Packaging Information
PowerPAD PCB Footprint
Page
Qty
Orderable Device Status Package Pins Package Eco Plan
MSL Peak Temp
Page
Page
Important Notice