STE 58760
(2)Whenever you press the "F6" key on the teach pendant, the monitor command menu accordingly changes. Repeat this key operation until the "JLIMIT>" command appears on the LCD display.
NEXT
F6
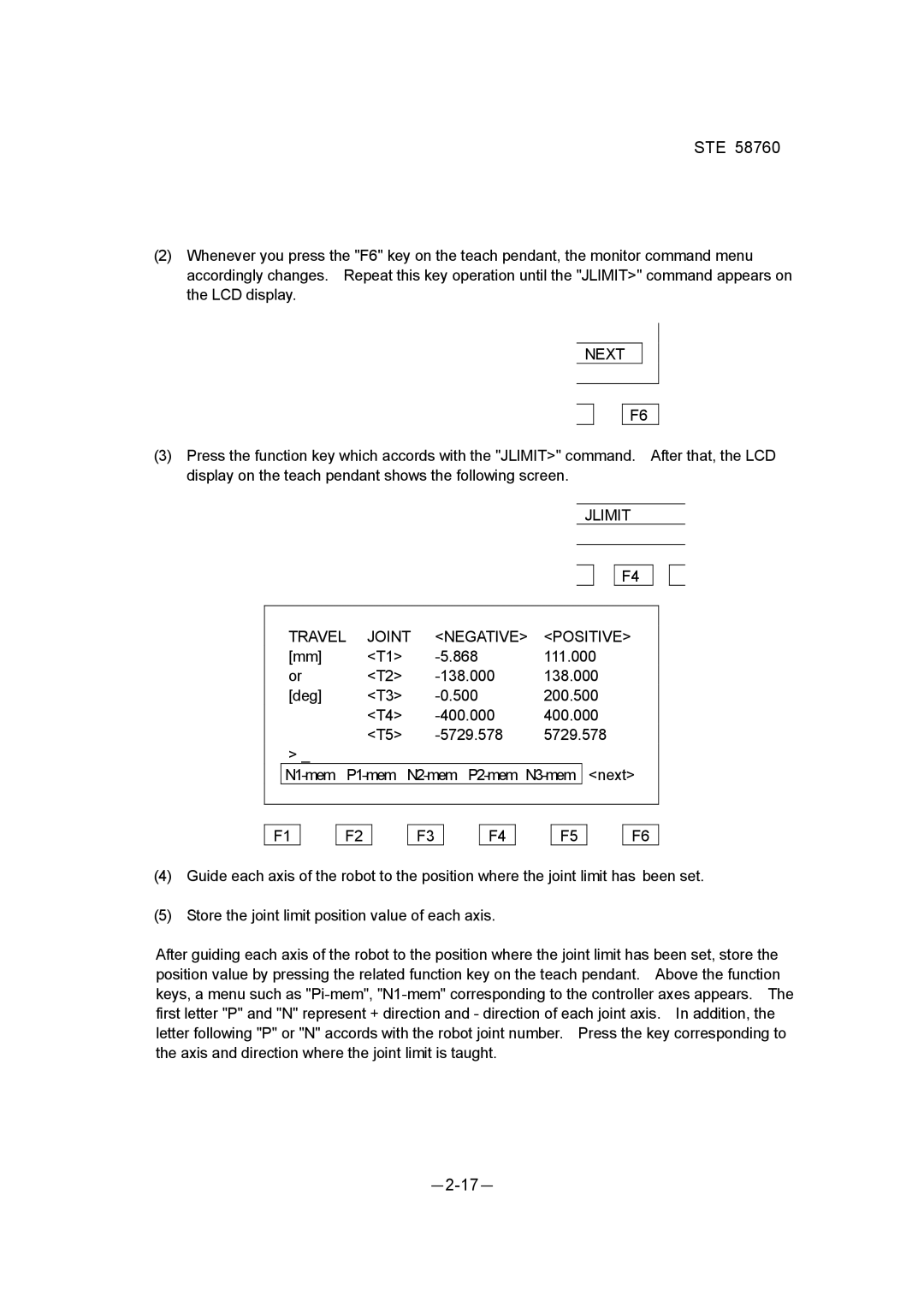
(3)Press the function key which accords with the "JLIMIT>" command. After that, the LCD display on the teach pendant shows the following screen.
|
|
|
| JLIMIT |
| ||
|
|
|
|
|
|
|
|
|
|
|
|
|
| F4 |
|
|
|
|
|
| |||
TRAVEL | JOINT | <NEGATIVE> | <POSITIVE> |
| |||
[mm] | <T1> | 111.000 |
|
| |||
or | <T2> | 138.000 |
|
| |||
[deg] | <T3> | 200.500 |
|
| |||
| <T4> | 400.000 |
|
| |||
| <T5> | 5729.578 |
|
| |||
> _
F1
F2
F3
F4
F5
F6
(4)Guide each axis of the robot to the position where the joint limit has been set.
(5)Store the joint limit position value of each axis.
After guiding each axis of the robot to the position where the joint limit has been set, store the position value by pressing the related function key on the teach pendant. Above the function keys, a menu such as