STE 58760
*
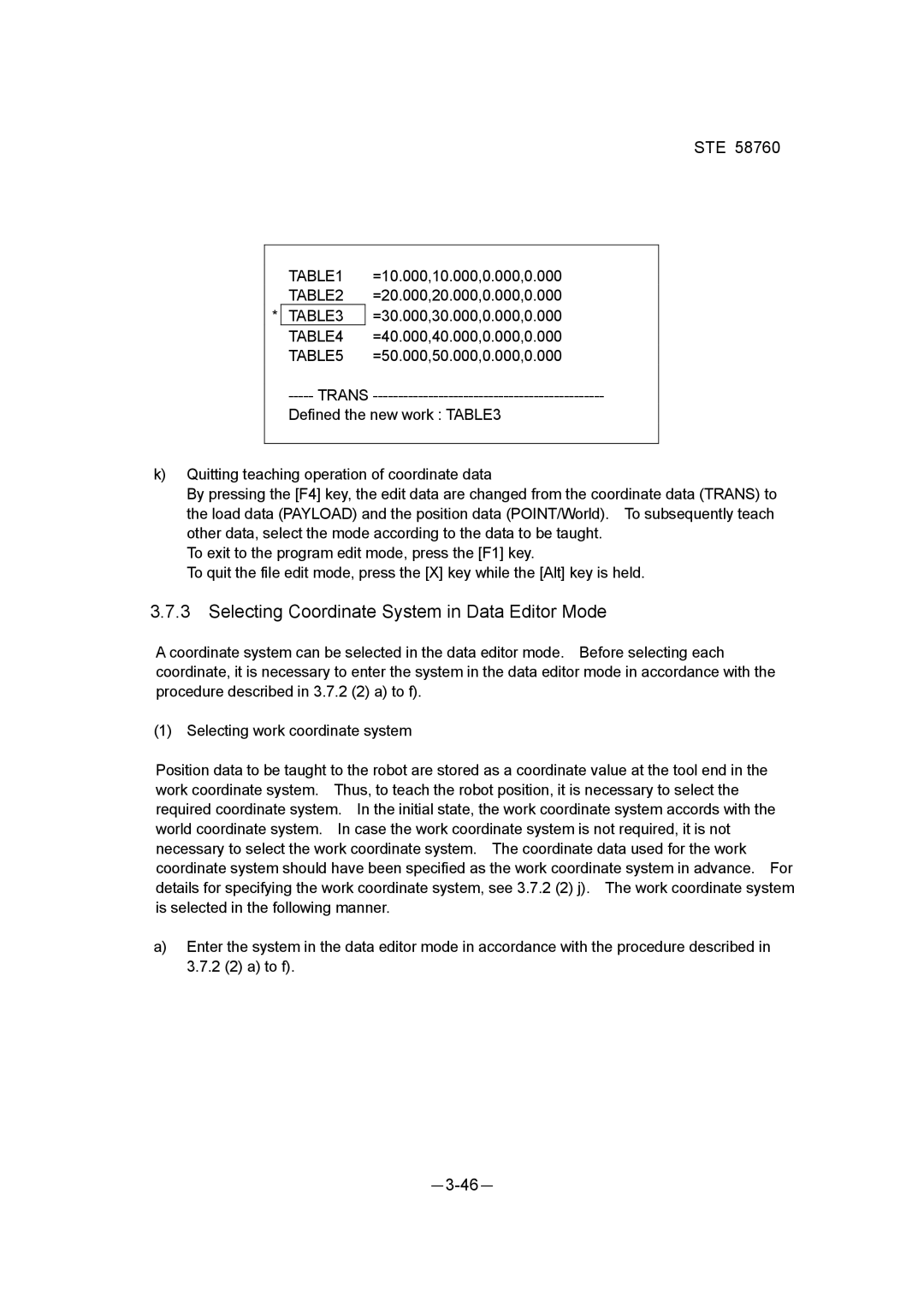
TABLE1
TABLE2
TABLE3
TABLE4
TABLE5
=10.000,10.000,0.000,0.000
=20.000,20.000,0.000,0.000
=30.000,30.000,0.000,0.000
=40.000,40.000,0.000,0.000
=50.000,50.000,0.000,0.000
-----TRANS
Defined the new work : TABLE3
k)Quitting teaching operation of coordinate data
By pressing the [F4] key, the edit data are changed from the coordinate data (TRANS) to the load data (PAYLOAD) and the position data (POINT/World). To subsequently teach other data, select the mode according to the data to be taught.
To exit to the program edit mode, press the [F1] key.
To quit the file edit mode, press the [X] key while the [Alt] key is held.
3.7.3Selecting Coordinate System in Data Editor Mode
A coordinate system can be selected in the data editor mode. Before selecting each coordinate, it is necessary to enter the system in the data editor mode in accordance with the procedure described in 3.7.2 (2) a) to f).
(1) Selecting work coordinate system
Position data to be taught to the robot are stored as a coordinate value at the tool end in the work coordinate system. Thus, to teach the robot position, it is necessary to select the required coordinate system. In the initial state, the work coordinate system accords with the world coordinate system. In case the work coordinate system is not required, it is not necessary to select the work coordinate system. The coordinate data used for the work coordinate system should have been specified as the work coordinate system in advance. For details for specifying the work coordinate system, see 3.7.2 (2) j). The work coordinate system is selected in the following manner.
a)Enter the system in the data editor mode in accordance with the procedure described in 3.7.2 (2) a) to f).