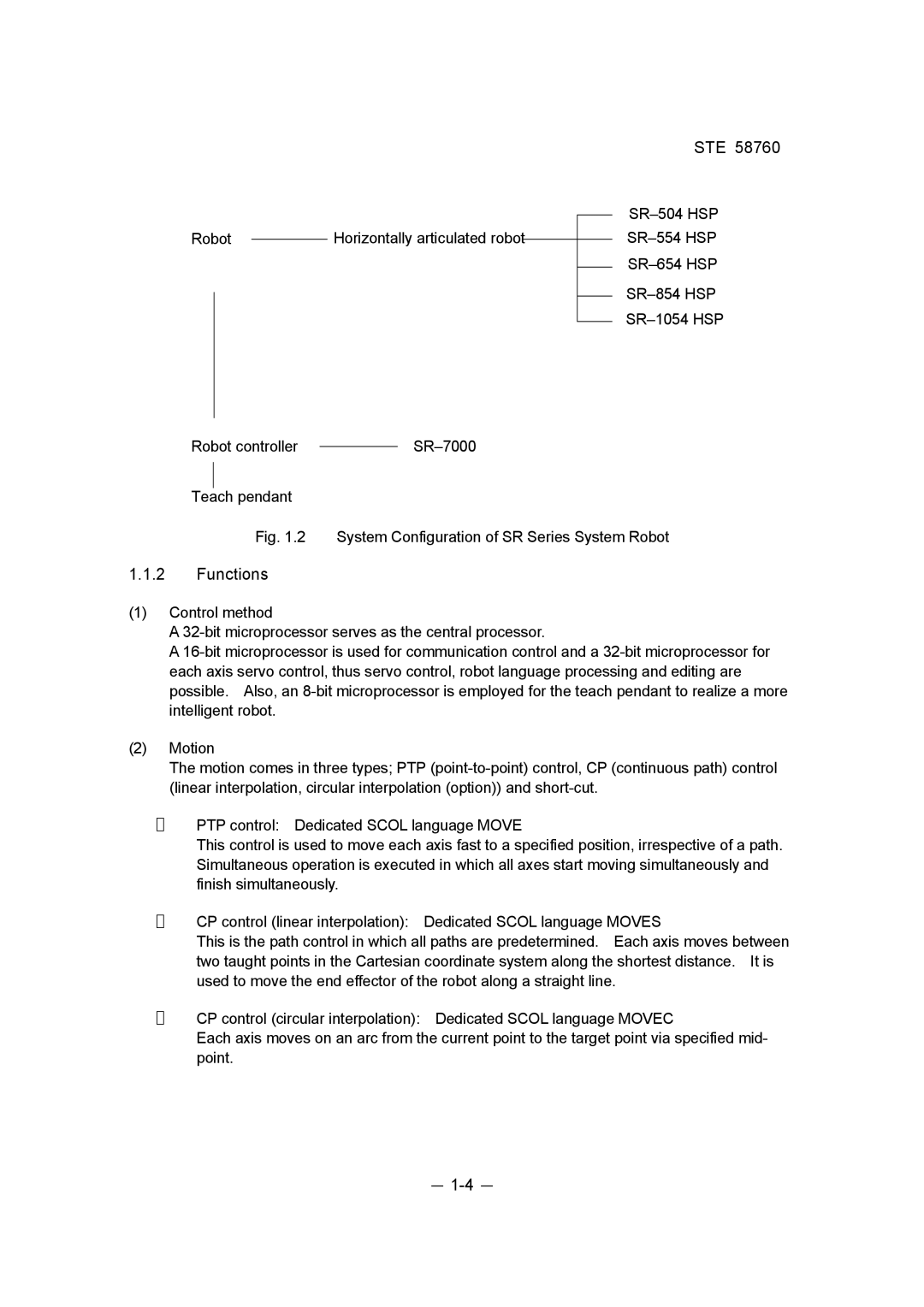
Robot |
| Horizontally articulated robot |
|
| |
|
|
| |||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Robot controller |
| ||
| |||
|
|
| |
|
|
|
|
Teach pendant |
|
| |
STE 58760
Fig. 1.2 System Configuration of SR Series System Robot
1.1.2Functions
(1)Control method
A
A
(2)Motion
The motion comes in three types; PTP
PTP control: Dedicated SCOL language MOVE
This control is used to move each axis fast to a specified position, irrespective of a path. Simultaneous operation is executed in which all axes start moving simultaneously and finish simultaneously.
CP control (linear interpolation): Dedicated SCOL language MOVES
This is the path control in which all paths are predetermined. Each axis moves between two taught points in the Cartesian coordinate system along the shortest distance. It is used to move the end effector of the robot along a straight line.
CP control (circular interpolation): Dedicated SCOL language MOVEC
Each axis moves on an arc from the current point to the target point via specified mid- point.