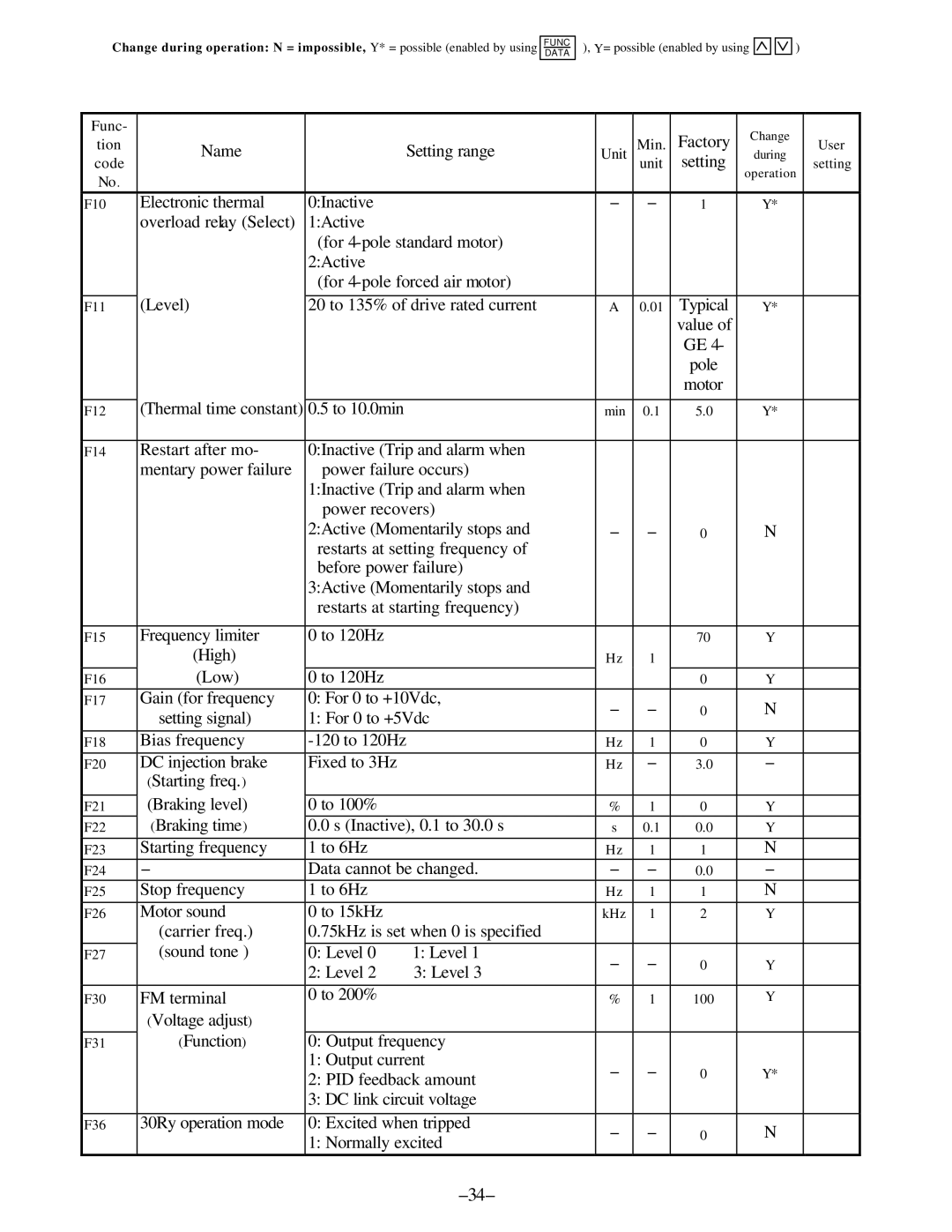
Change during operation: N = impossible, Y* = possible (enabled by using
FUNC DATA
), Y= possible (enabled by using ![]()
![]()
![]()
![]()
![]()
![]() )
)
Func- |
|
|
|
|
| Factory | Change |
|
tion | Name |
| Setting range |
| Min. | User | ||
| Unit | during | ||||||
code |
| unit | setting | setting | ||||
|
|
|
| operation | ||||
No. |
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
| |
F10 | Electronic thermal | 0:Inactive |
| - | - | 1 | Y* |
|
| overload relay (Select) | 1:Active |
|
|
|
|
|
|
|
| (for |
|
|
|
|
| |
|
| 2:Active |
|
|
|
|
|
|
|
| (for |
|
|
|
|
| |
| (Level) |
|
|
|
|
|
| |
F11 | 20 to 135% of drive rated current | A | 0.01 | Typical | Y* |
| ||
|
|
|
|
|
| value of |
|
|
|
|
|
|
|
| GE 4- |
|
|
|
|
|
|
|
| pole |
|
|
|
|
|
|
|
| motor |
|
|
| (Thermal time constant) |
|
|
|
|
|
|
|
F12 | 0.5 to 10.0min |
| min | 0.1 | 5.0 | Y* |
| |
|
|
|
|
|
|
|
| |
F14 | Restart after mo- | 0:Inactive (Trip and alarm when |
|
|
|
|
| |
| mentary power failure | power failure occurs) |
|
|
|
|
| |
|
| 1:Inactive (Trip and alarm when |
|
|
|
|
| |
|
| power recovers) |
|
|
|
|
| |
|
| 2:Active (Momentarily stops and | - | - | 0 | N |
| |
|
| restarts at setting frequency of |
|
|
|
|
| |
|
| before power failure) |
|
|
|
|
| |
|
| 3:Active (Momentarily stops and |
|
|
|
|
| |
|
| restarts at starting frequency) |
|
|
|
|
| |
|
|
|
|
|
|
|
|
|
F15 | Frequency limiter | 0 to 120Hz |
|
|
| 70 | Y |
|
| (High) |
|
| Hz | 1 |
|
|
|
F16 | (Low) | 0 to 120Hz |
|
|
| 0 | Y |
|
F17 | Gain (for frequency | 0: For 0 to +10Vdc, | - | - | 0 | N |
| |
| setting signal) | 1: For 0 to +5Vdc |
| |||||
|
|
|
|
|
| |||
|
|
|
|
|
|
|
| |
F18 | Bias frequency |
| Hz | 1 | 0 | Y |
| |
F20 | DC injection brake | Fixed to 3Hz |
| Hz | - | 3.0 | - |
|
| (Starting freq.) |
|
|
|
|
|
|
|
| (Braking level) |
|
|
|
|
|
|
|
F21 | 0 to 100% |
| % | 1 | 0 | Y |
| |
F22 | (Braking time) | 0.0 s (Inactive), 0.1 to 30.0 s | s | 0.1 | 0.0 | Y |
| |
F23 | Starting frequency | 1 to 6Hz |
| Hz | 1 | 1 | N |
|
F24 | - | Data cannot be changed. | - | - | 0.0 | - |
| |
F25 | Stop frequency | 1 to 6Hz |
| Hz | 1 | 1 | N |
|
F26 | Motor sound | 0 to 15kHz |
| kHz | 1 | 2 | Y |
|
| (carrier freq.) | 0.75kHz is set when 0 is specified |
|
|
|
|
| |
| (sound tone ) |
|
|
|
|
|
|
|
F27 | 0: Level 0 | 1: Level 1 | - | - | 0 | Y |
| |
|
| 2: Level 2 | 3: Level 3 |
| ||||
|
|
|
|
|
|
| ||
|
|
|
|
|
|
|
|
|
F30 | FM terminal | 0 to 200% |
| % | 1 | 100 | Y |
|
| (Voltage adjust) |
|
|
|
|
|
|
|
F31 | (Function) | 0: Output frequency |
|
|
|
|
| |
|
| 1: Output current | - | - | 0 | Y* |
| |
|
| 2: PID feedback amount |
| |||||
|
|
|
|
|
|
| ||
|
| 3: DC link circuit voltage |
|
|
|
|
| |
|
|
|
|
|
|
|
| |
F36 | 30Ry operation mode | 0: Excited when tripped | - | - | 0 | N |
| |
|
| 1: Normally excited |
| |||||
|
|
|
|
|
|
| ||