Change during operation: N = impossible, Y* = possible (enabled by using
FUNC DATA
), Y= possible (enabled by using ![]()
![]()
![]()
![]()
![]()
![]() )
)
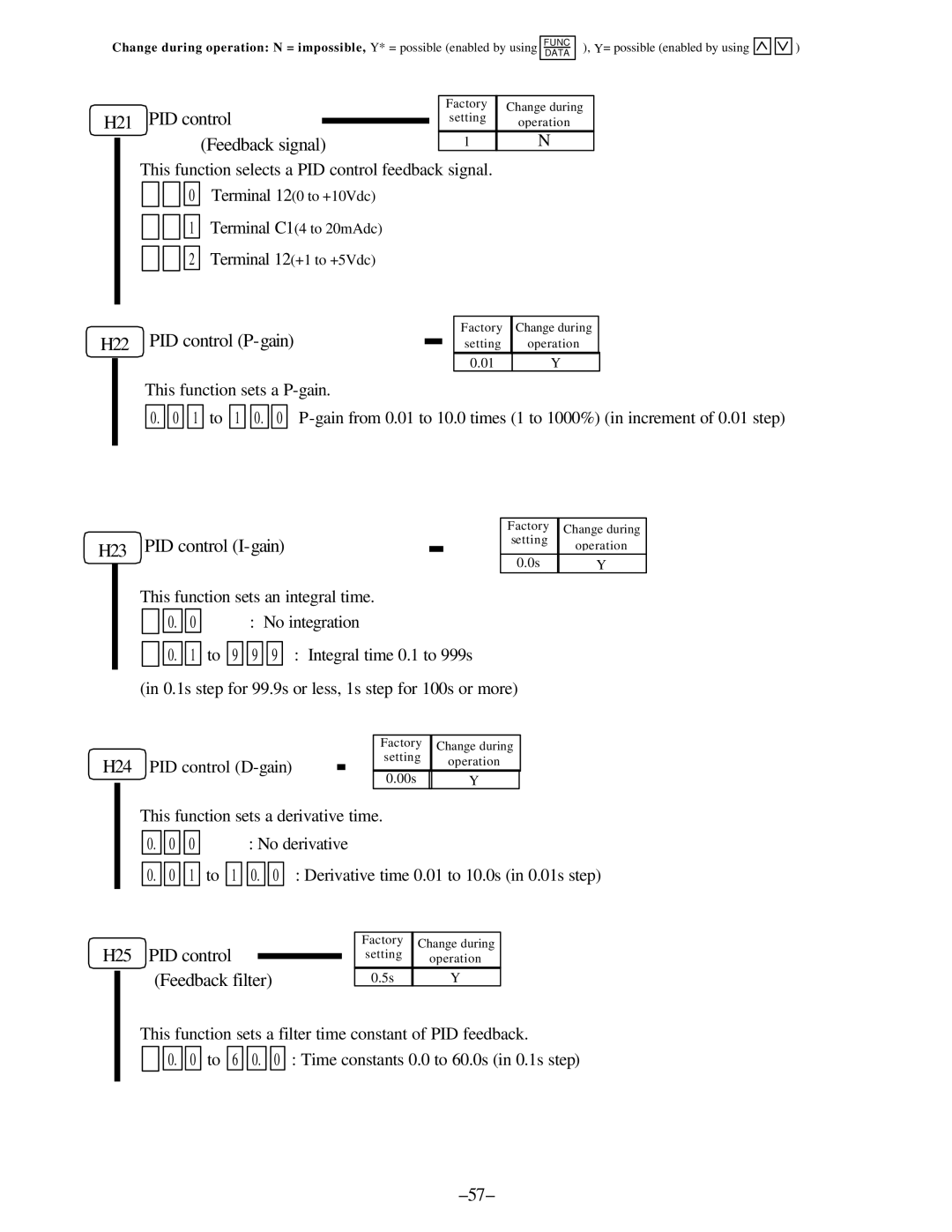
H21 PID control (Feedback signal)
Factory | Change during |
setting | operation |
| |
1 | N |
This function selects a PID control feedback signal.
![]()
![]() 0 Terminal 12(0 to +10Vdc)
0 Terminal 12(0 to +10Vdc)
![]()
![]() 1 Terminal C1(4 to 20mAdc)
1 Terminal C1(4 to 20mAdc) ![]()
![]() 2 Terminal 12(+1 to +5Vdc)
2 Terminal 12(+1 to +5Vdc)
H22 PID control (P-gain)
Factory | Change during |
setting | operation |
0.01Y
This function sets a
0. ![]()
![]() 0
0 ![]()
![]() 1 to 1
1 to 1 ![]()
![]() 0.
0. ![]()
![]() 0
0
H23 PID control (I-gain)
Factory | Change during |
setting | operation |
| |
0.0s | Y |
This function sets an integral time.
0. |
| 0 |
|
| : | No integration | |||
|
|
|
|
|
|
|
|
| |
0. |
| 1 | to | 9 |
| 9 |
| 9 | : Integral time 0.1 to 999s |
(in 0.1s step for 99.9s or less, 1s step for 100s or more)
H24 PID control
Factory | Change during |
setting | operation |
| |
0.00s | Y |
This function sets a derivative time.
0. |
| 0 |
| 0 |
|
|
| : No derivative | |||
|
|
|
|
|
|
|
|
|
| ||
0. |
| 0 |
| 1 | to | 1 |
| 0. |
| 0 | : Derivative time 0.01 to 10.0s (in 0.01s step) |
H25 PID control (Feedback filter)
Factory Change during
setting operation
0.5s | Y |
This function sets a filter time constant of PID feedback.
![]()
![]() 0.
0. ![]()
![]() 0 to 6
0 to 6 ![]()
![]() 0.
0. ![]()
![]() 0 : Time constants 0.0 to 60.0s (in 0.1s step)
0 : Time constants 0.0 to 60.0s (in 0.1s step)