|
|
|
|
|
|
|
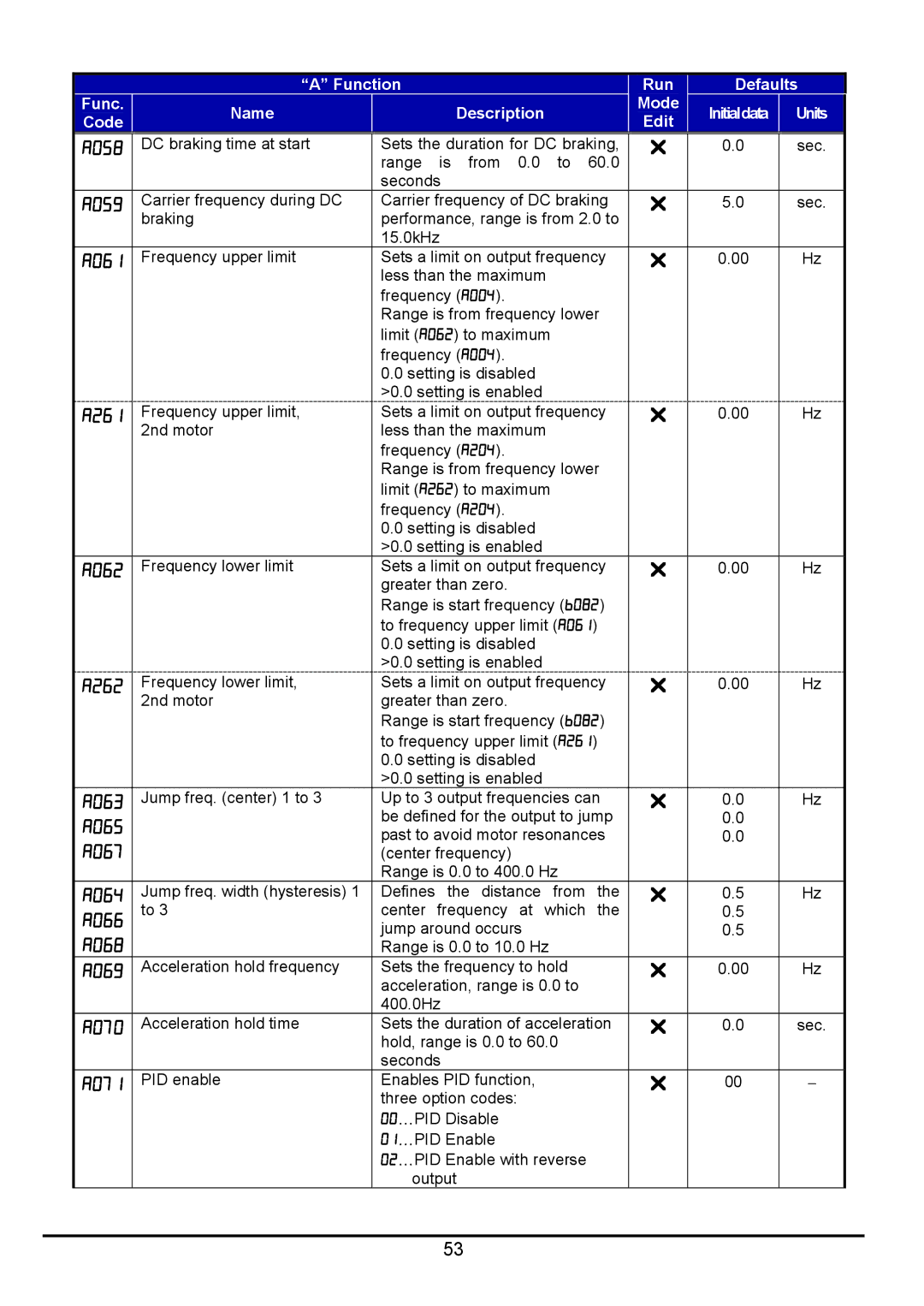
| Func. |
| Name |
| Description |
|
| Code |
|
|
| ||
|
|
|
|
|
|
Run
Mode
Edit
Initialdata Units
a058 | DC braking time at start | Sets the duration for DC braking, |
| 0.0 | sec. |
|
| range is from 0.0 to 60.0 |
|
|
|
|
| seconds |
|
|
|
a059 | Carrier frequency during DC | Carrier frequency of DC braking |
| 5.0 | sec. |
braking | performance, range is from 2.0 to |
|
|
| |
|
| 15.0kHz |
|
|
|
A061 | Frequency upper limit | Sets a limit on output frequency |
| 0.00 | Hz |
|
| less than the maximum |
|
|
|
|
| frequency (A004). |
|
|
|
|
| Range is from frequency lower |
|
|
|
|
| limit (A062) to maximum |
|
|
|
|
| frequency (A004). |
|
|
|
|
| 0.0 setting is disabled |
|
|
|
|
| >0.0 setting is enabled |
|
|
|
A261 | Frequency upper limit, | Sets a limit on output frequency |
| 0.00 | Hz |
2nd motor | less than the maximum |
|
|
| |
|
| frequency (A204). |
|
|
|
|
| Range is from frequency lower |
|
|
|
|
| limit (A262) to maximum |
|
|
|
|
| frequency (A204). |
|
|
|
|
| 0.0 setting is disabled |
|
|
|
|
| >0.0 setting is enabled |
|
|
|
A062 | Frequency lower limit | Sets a limit on output frequency |
| 0.00 | Hz |
|
| greater than zero. |
|
|
|
|
| Range is start frequency (B082) |
|
|
|
|
| to frequency upper limit (A061) |
|
|
|
|
| 0.0 setting is disabled |
|
|
|
|
| >0.0 setting is enabled |
|
|
|
A262 | Frequency lower limit, | Sets a limit on output frequency |
|
| Hz |
0.00 | |||||
2nd motor | greater than zero. |
|
|
| |
|
| Range is start frequency (B082) |
|
|
|
|
| to frequency upper limit (A261) |
|
|
|
|
| 0.0 setting is disabled |
|
|
|
|
| >0.0 setting is enabled |
|
|
|
A063 | Jump freq. (center) 1 to 3 | Up to 3 output frequencies can |
| 0.0 | Hz |
A065 |
| be defined for the output to jump |
| 0.0 |
|
| past to avoid motor resonances |
| 0.0 |
| |
A067 |
|
|
| ||
| (center frequency) |
|
|
| |
|
| Range is 0.0 to 400.0 Hz |
|
|
|
A064 | Jump freq. width (hysteresis) 1 | Defines the distance from the |
| 0.5 | Hz |
A066 | to 3 | center frequency at which the |
| 0.5 |
|
A068 |
| jump around occurs |
| 0.5 |
|
| Range is 0.0 to 10.0 Hz |
|
|
| |
A069 | Acceleration hold frequency | Sets the frequency to hold |
| 0.00 | Hz |
|
| acceleration, range is 0.0 to |
|
|
|
|
| 400.0Hz |
|
|
|
A070 | Acceleration hold time | Sets the duration of acceleration |
| 0.0 | sec. |
|
| hold, range is 0.0 to 60.0 |
|
|
|
|
| seconds |
|
|
|
A071 | PID enable | Enables PID function, |
| 00 | − |
|
| three option codes: |
|
|
|
|
| 00…PID Disable |
|
|
|
|
| 01…PID Enable |
|
|
|
|
| 02…PID Enable with reverse |
|
|
|
|
| output |
|
|
|
53