|
|
|
|
|
|
| Run |
|
|
|
|
|
|
|
|
Func. | Name |
|
| Description |
|
| Mode |
|
| Initial data |
|
|
| Units |
|
Code |
|
|
|
|
|
| Edit |
|
|
|
|
|
|
|
|
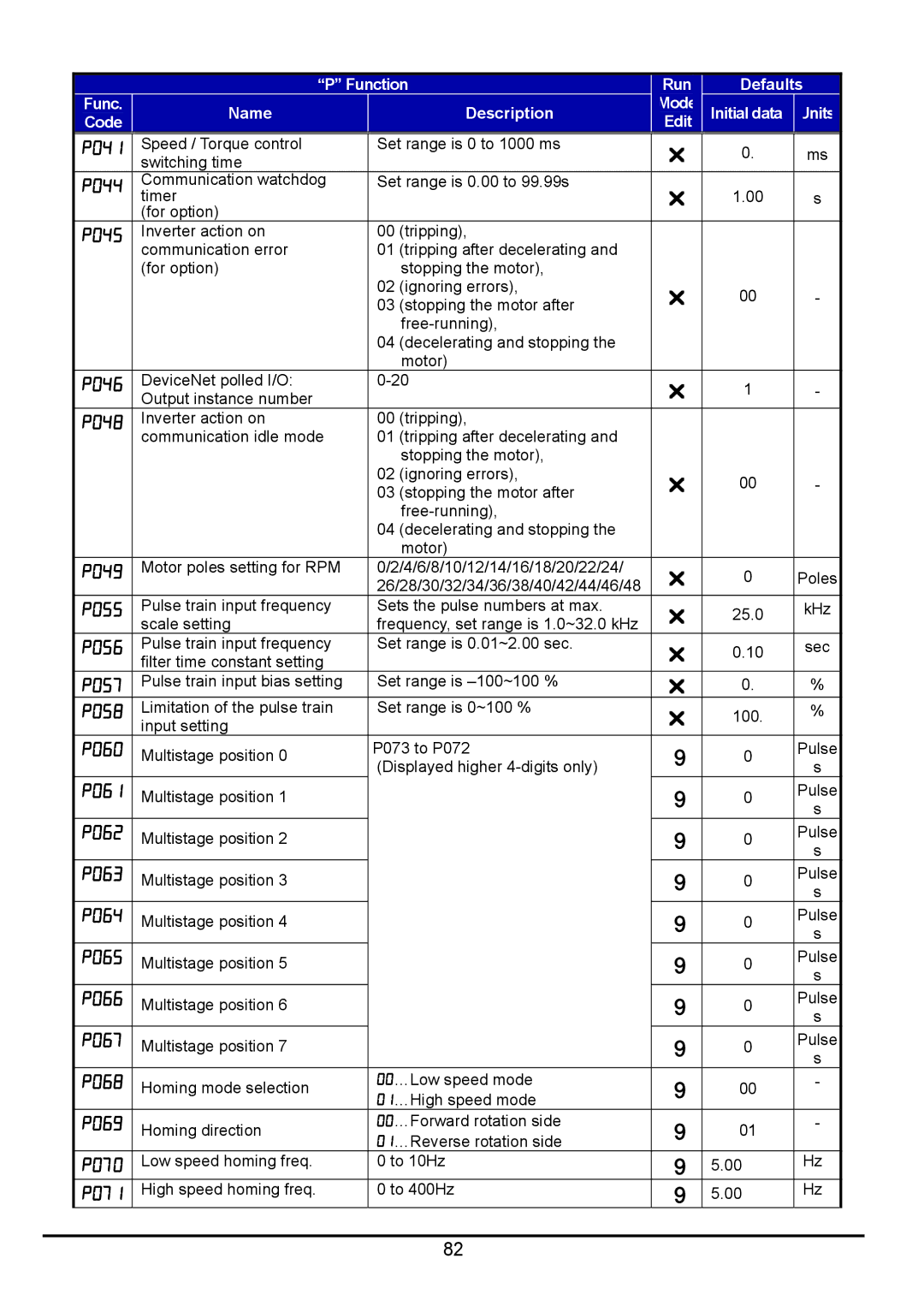
p041 | Speed / Torque control |
|
| Set range is 0 to 1000 ms |
|
|
|
|
| 0. |
|
|
| ms | |
| switching time |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P044 | Communication watchdog |
|
| Set range is 0.00 to 99.99s |
|
|
|
|
| 1.00 |
|
|
| s | |
timer |
|
|
|
|
|
|
|
|
|
|
| ||||
| (for option) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P045 | Inverter action on |
|
| 00 (tripping), |
|
|
|
|
|
|
|
|
|
|
|
| communication error |
|
| 01 (tripping after decelerating and |
|
|
|
|
|
|
|
|
|
|
|
| (for option) |
|
| stopping the motor), |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 02 (ignoring errors), |
|
|
|
|
| 00 |
|
| - |
| |
|
|
|
| 03 (stopping the motor after |
|
|
|
|
|
|
|
| |||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
|
|
|
| 04 (decelerating and stopping the |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| motor) |
|
|
|
|
|
|
|
|
|
|
|
P046 | DeviceNet polled I/O: |
|
|
|
|
|
| 1 |
|
| - |
| |||
| Output instance number |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P048 | Inverter action on |
|
| 00 (tripping), |
|
|
|
|
|
|
|
|
|
|
|
| communication idle mode |
|
| 01 (tripping after decelerating and |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| stopping the motor), |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 02 (ignoring errors), |
|
|
|
|
| 00 |
|
| - |
| |
|
|
|
| 03 (stopping the motor after |
|
|
|
|
|
|
|
| |||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
|
|
|
| 04 (decelerating and stopping the |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| motor) |
|
|
|
|
|
|
|
|
|
|
|
P049 | Motor poles setting for RPM |
| 0/2/4/6/8/10/12/14/16/18/20/22/24/ |
|
|
|
|
| 0 |
|
| Poles | |||
|
|
| 26/28/30/32/34/36/38/40/42/44/46/48 |
|
|
|
|
|
|
|
|
|
|
| |
p055 | Pulse train input frequency |
|
| Sets the pulse numbers at max. |
|
|
|
|
| 25.0 |
|
|
| kHz | |
| scale setting |
|
| frequency, set range is 1.0~32.0 kHz |
|
|
|
|
|
|
|
|
|
|
|
p056 | Pulse train input frequency |
|
| Set range is 0.01~2.00 sec. |
|
|
|
|
| 0.10 |
|
|
| sec | |
| filter time constant setting |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
p057 | Pulse train input bias setting |
| Set range is |
|
|
|
|
| 0. |
|
| % |
| ||
p058 | Limitation of the pulse train |
|
| Set range is 0~100 % |
|
|
|
|
| 100. |
|
| % |
| |
| input setting |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P060 | Multistage position 0 |
| P073 to P072 |
|
|
|
|
| 0 |
|
| Pulse | |||
|
|
|
| (Displayed higher |
|
|
|
|
|
|
|
|
| s | |
P061 | Multistage position 1 |
|
|
|
|
|
|
|
| 0 |
|
| Pulse | ||
|
|
|
|
|
|
|
|
|
|
|
|
|
| s | |
P062 | Multistage position 2 |
|
|
|
|
|
|
|
| 0 |
|
| Pulse | ||
|
|
|
|
|
|
|
|
|
|
|
|
|
| s | |
P063 | Multistage position 3 |
|
|
|
|
|
|
|
| 0 |
|
| Pulse | ||
|
|
|
|
|
|
|
|
|
|
|
|
|
| s | |
P064 | Multistage position 4 |
|
|
|
|
|
|
|
| 0 |
|
| Pulse | ||
|
|
|
|
|
|
|
|
|
|
|
|
|
| s | |
P065 | Multistage position 5 |
|
|
|
|
|
|
|
| 0 |
|
| Pulse | ||
|
|
|
|
|
|
|
|
|
|
|
|
|
| s | |
P066 | Multistage position 6 |
|
|
|
|
|
|
|
| 0 |
|
| Pulse | ||
|
|
|
|
|
|
|
|
|
|
|
|
|
| s | |
P067 | Multistage position 7 |
|
|
|
|
|
|
|
| 0 |
|
| Pulse | ||
|
|
|
|
|
|
|
|
|
|
|
|
|
| s | |
P068 | Homing mode selection |
|
| 00…Low speed mode |
|
|
|
|
| 00 |
|
| - |
| |
|
|
|
| 01…High speed mode |
|
|
|
|
|
|
|
|
|
|
|
P069 | Homing direction |
|
| 00…Forward rotation side |
|
|
|
|
| 01 |
|
| - |
| |
|
|
|
| 01…Reverse rotation side |
|
|
|
|
|
|
|
|
|
|
|
P070 | Low speed homing freq. |
| 0 to 10Hz |
|
|
|
|
| 5.00 |
|
|
| Hz | ||
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||
P071 | High speed homing freq. |
| 0 to 400Hz |
|
|
|
|
| 5.00 |
|
|
| Hz | ||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
82