Lin+Drive Servo Control
Table of Contents
Ii Table of Contents MN1851
Minimum system requirements
24VDC Logic Power Input
Appendix a
Appendix B
Iv Table of Contents MN1851
Limited Warranty
Section General Information
CE Compliance
Product Notice Intended use
Could result in injury or death
Could result in damage to property
General Information MN1851
Do not touch any circuit board, power device or electrical
Connection before you first ensure that power has been
Do not apply AC power before you ensure that grounds are
Voltages that are conducted to its power input terminals.
General Information MN1851
Section Product Overview
Control Outputs
Encoder Output
Section Receiving and Installation
Mechanical Installation
Receiving & Installation MN1851
Control
GND
Recommended System Grounding 1 phase for UL
Recommended System Grounding 1 phase for CE
Input Power Conditioning
System Grounding Ungrounded Distribution System
Wire Size for units without Power Supply
X1 Power Connections
Breaker
Mm2
Components not provided with Control
Baldor
Baldor Control
Earth
Breaker
Baldor Option S Option P Control Regen Resistor
Baldor Option P Control
� Important
LPxAxxxx-xxx3 only
Holes in the top and bottom
Enclosure are for cable clamps. Be sure
To use an M4 bolt 12mm in length
Longer bolts may short circuit
11 Motor Connections for UL
12 Motor Connections for CE
13 Optional M-Contactor Connections
Control Input Wiring
X3 Control Inputs & Digital I/O Connections
Single Ended Connection Differential Connection
X3 Digital Inputs Opto Isolated Inputs uses Cref
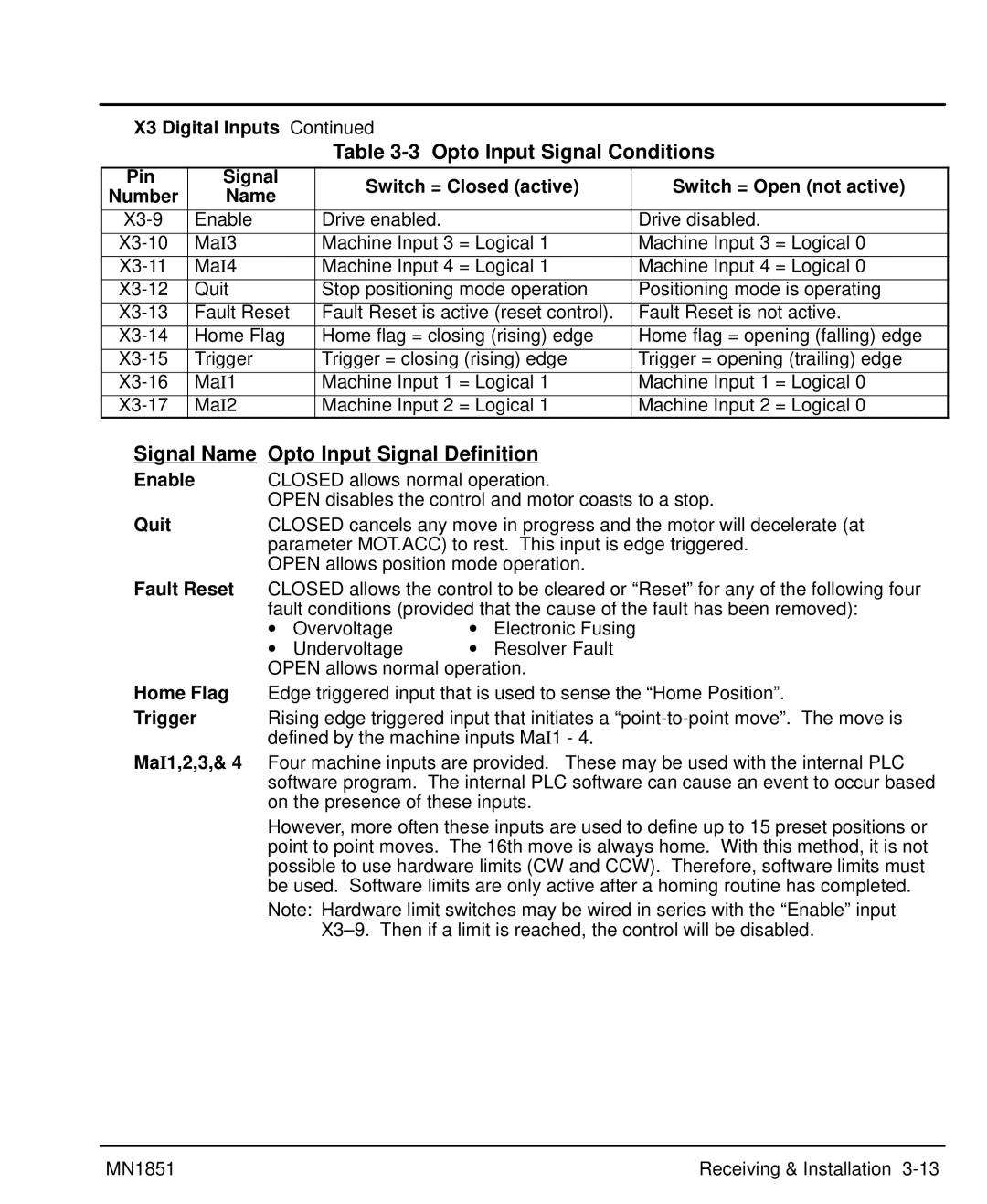
Opto Input Signal Conditions
Signal Name Opto Input Signal Definition
Process Duration
Time Required Duration
Opto Output Signal Conditions
Fault Relay
X3 Digital Outputs
MaO1
X6 RS232 / 485 Connections
Null Modem Cable Connections
Control TXD
Computer
What is a termination resistor?
Where are these resistors placed?
RS485
How many resistors should my system have?
= Twisted Pair
TX+ Dgnd GND
TX+ RX+ Dgnd
TX+ RX+ Dgnd GND
Buffered Encoder Output at X7 Connector
X7 Pin Signal Name
X7 Encoder Output
Reserved
X9 Encoder and Hall Feedback LPxAxxxx-Exxx
Section Switch Setting and Start-Up
Switch AS1 Settings
Control Address Setting
Address Setting, AS1-1 to AS1-4 for Multi-Drop Applications
Setting of switches AS1-5 to AS1-8
Switch Function
Offset Tuning
AS1-5 to AS1-8 Description
Start-Up Procedure
Power Off Checks
Power On Checks
Procedure
Switch Setting & Start-Up MN1851
Installing Software on your PC
Host Communications Setup
Section Operation
Windows
Windows NT
Using The Setup Wizard
Flowchart of the Setup Wizard
Operation MN1851
Page
There are 7 parts to the setup procedure Motor
Motor parameters. Click Download when finished
Encoder Feedback
Encoder Feedback Motor pitch mm 60.96
Encoder Feedback
Lmcf All Micron Counts / meter Counts / mm
Operating Mode Selection Screen
Operating Mode
Current Parameter
MN1851 Operation
Software Triggered
MAI4 MAI3 MAI2 MAI1
Procedure to define home position
Home
Index channel, Capture and Actual Position
Set this value. Click Download when finished
Drift
Setup
Main Menu Choice Descriptions
File
Edit
Tuning
Watch
Functions
Motion
PLC Program Menu
Help
Velocity Parameters RPM m/s
Linear Motor
Meters/second
Section Troubleshooting
1Operating Mode Indications
MN1851 Troubleshooting
Overview
Long as the error is less than ± 215 ±
Section Specifications & Product Data
Identification
Specifications
To 3300 feet 1000 meters. Derate the continuous
+0 to 40. Above 40 C, derate the continuous and peak
Output current by 2.5% per C above 40 C. Maximum
Peak output current by 1.1% for each 330 feet
Description Unit
24VDC Logic Power Input Option LPxAxxxx-xxx3 only
24VDC Logic Power Input Option LP4Axxxx-xxx3 only
Specifications & Product Data MN1851
Velocity Control
Encoder Input Feedback
Regeneration
Dimensions
Size A, B and C
Clearance Requirements all sizes 0.06″ 15mm top and bottom
Wiring of Shielded Screened Cables
Section CE Guidelines
CE Declaration of Conformity
EMC Conformity and CE Marking
EMC Wiring Technique
CE Guidelines MN1851
Grounding Earth
EMC Installation Instructions
Cable Screens Grounding
Input Signal Cable Grounding
Simulated Encoder Output Cable Grounding
Encoder Input Cable Grounding
To Controller
Section Accessories and Options
Connectors
Mating Connector by connector number for spare parts
Cables
AC Filter Dimensions
Accessories & Options MN1851
Depth = F
Fo r
Regeneration Resistor
Package
Accessories & Options MN1851
Appendix a Manual Tuning
Tools are available to make tuning easier, such as
General Tuning Rules
Manual Tuning
There are 7 parts to the setup procedure
Parameters. Click Download when finished
Manual Tuning MN1851
Motor
15240 000,000 10,000,000
Figure A-13 Current Parameter Screen
Figure A-14 Velocity Parameter Screen Drift
Figure A-15 Drift Parameter Screen
Figure A-16 Select Manual Tuning
Figure A-17 Inertia and Load Response Examples
Tracking factor
Figure A-18 PI Compensation Menu
Page
Plotting of Move
Control Window
Graphic Screen
Jog Block
Appendix B Command Set
Lin Ascii Command Set General
Syntax General structure of the Ascii command
MN1851 Command Set B-1
Pulses/rev Resolution
Parameters and Units
Encoder
Start-up with Terminal Communication and Command Examples
Execution Error invalid command
Input Buffer Overflow command line exceeded 80 char
Control Design Failure invalid control design
General Settings System Constants
Command Set MN1851
Basic System Parameters Motor Parameters MTR. prefixed
Drive Parameters typical DRV. prefixed
Software Limit Switches Parameters
Variables None Software Limit Switches Methods
MN1851 Command Set B-5
Command Description Units Range Default E2 / Par. set
PLC Parameters
Variables None PLC Methods
PLC.LINE
Relay
MN1851 Command Set B-7
OCI Interface Parameters
Digital Interface Parameters
Analog Interface Parameters
Queries / modifications of Fault Listing Variables
X1 Possible Faults X1 Fault Display Description
System Variables General Variables
Communication Settings Parameter
MN1851 Command Set B-9
Methods
Variable
Queries of System Variables, Status, Faults Single Values
Data Record REC. prefixed Parameters
Data Record REC. prefixed Variable
Operation Mode Control Normal Modes Parameters
Memory related methods Queries / modifications RAM related
Eeprom related
Normal Modes Variables
Sys.mod Current mode Parameters
Current mode Variables
Current mode Methods
Query for actual current command
Sys.mod 1 & Sys.mod Velocity mode Parameters
Velocity mode Variables
Velocity mode Methods
MN1851 Command Set B-13
Jog Parameters
JOG.TIME
JOG.TYPE
JOG.VEL
MN1851 Command Set B-15
Position Controller Position Controller Parameters
Variables
HW.GRFX
HW.GRSH
HW.PLC
HW.RES
Baldor Electric Company
Baldor Electric Company MN1851 10/00 C&J
Lin+Drive Servo Control MN1851