4.3.2 Analog outputs (Drive Demand/Command) - X7
12
1
Location | Breakout module, connector X7 | |
|
|
|
Pin | Name | Description |
|
|
|
1 | Demand0 | Demand output signal for axis 0 |
|
|
|
2 | AGND | Analog ground |
|
|
|
3 | Shield | Shield connection |
|
|
|
4 | Demand1 | Demand output signal for axis 1 |
|
|
|
5 | AGND | Analog ground |
|
|
|
6 | Shield | Shield connection |
|
|
|
7 | Demand2 | Demand output signal for axis 2 |
|
|
|
8 | AGND | Analog ground |
|
|
|
9 | Shield | Shield connection |
|
|
|
10 | Demand | Demand output signal for axis 3 |
|
|
|
11 | AGND | Analog ground |
|
|
|
12 | Shield | Shield connection |
|
|
|
Description
Four independent command outputs
Output range: ±10VDC (±0.1%).
Resolution:
Output current: 1mA maximum
Update frequency: Immediate
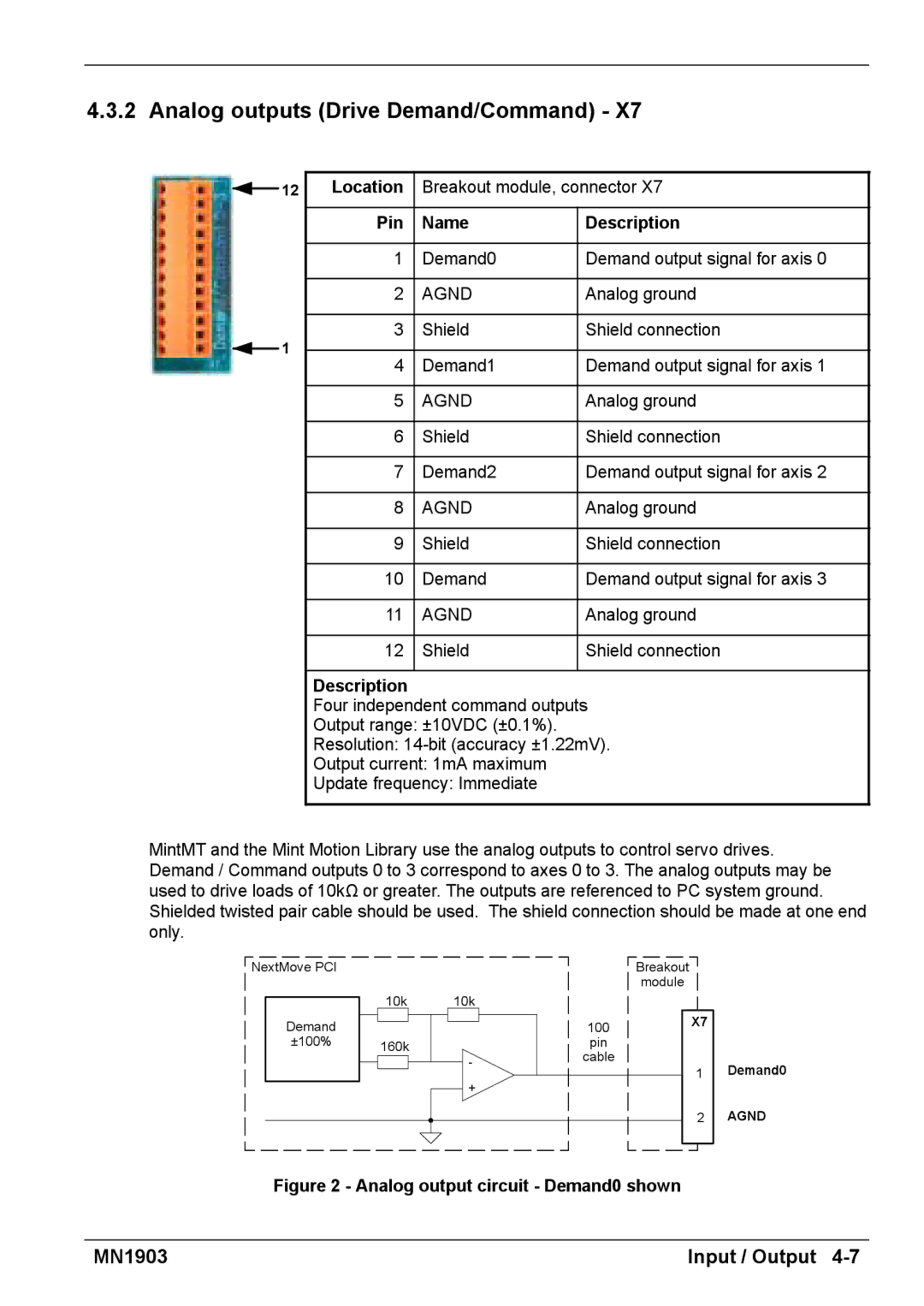
MintMT and the Mint Motion Library use the analog outputs to control servo drives. Demand / Command outputs 0 to 3 correspond to axes 0 to 3. The analog outputs may be used to drive loads of 10kΩ or greater. The outputs are referenced to PC system ground. Shielded twisted pair cable should be used. The shield connection should be made at one end only.
NextMove PCI |
|
|
| Breakout |
|
|
|
|
| module |
|
| 10k | 10k |
|
|
|
Demand |
|
| 100 | X7 |
|
±100% | 160k |
| pin |
|
|
|
| - | cable | 1 | Demand0 |
|
|
| |||
|
| + |
| ||
|
|
|
|
| |
|
|
|
| 2 | AGND |
Figure 2 - Analog output circuit - Demand0 shown
MN1903 | Input / Output |