The analog demand output is controlled by a
KVELFF | = | 2048 / 200 |
=10.24
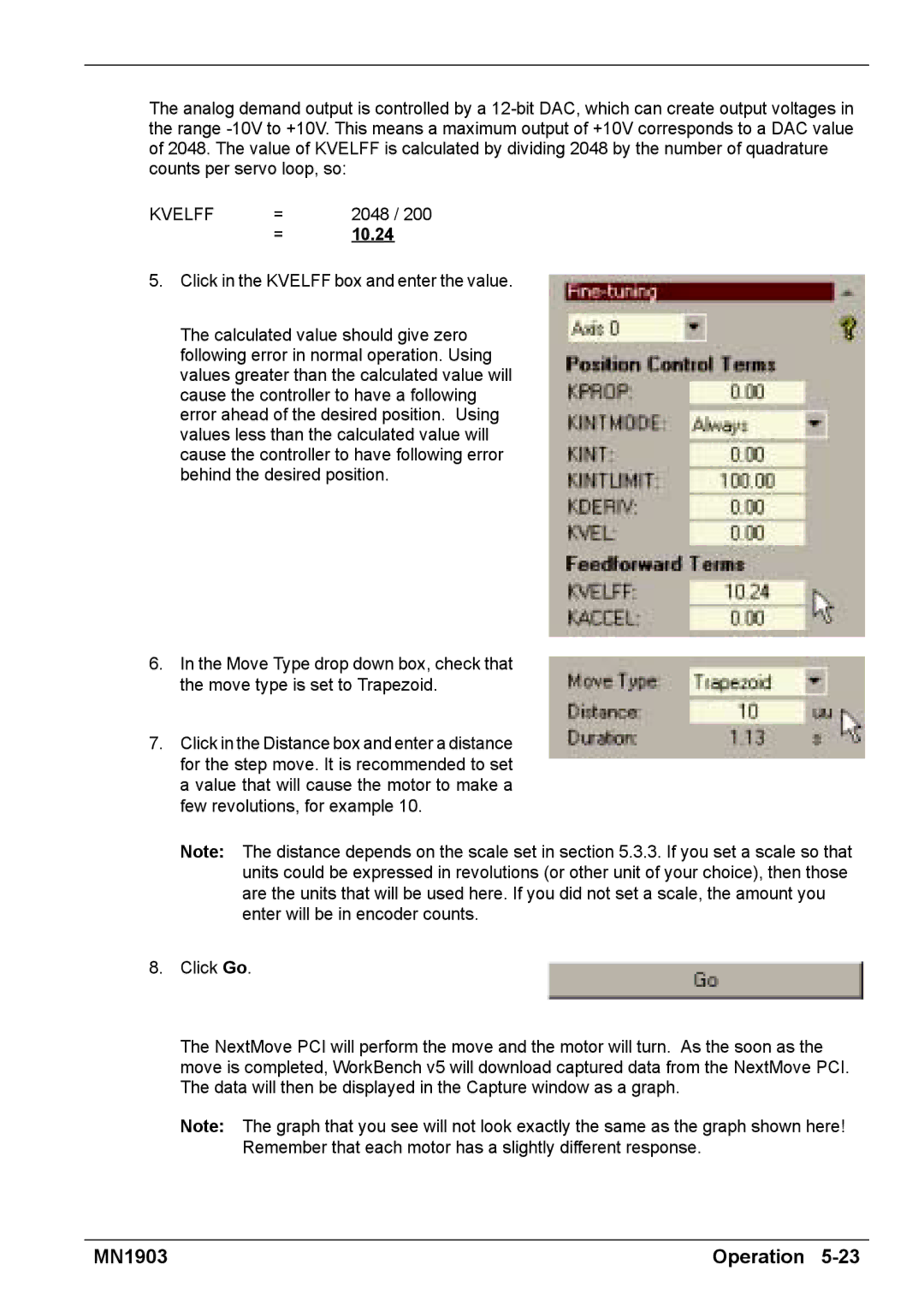
5.Click in the KVELFF box and enter the value.
The calculated value should give zero following error in normal operation. Using values greater than the calculated value will cause the controller to have a following error ahead of the desired position. Using values less than the calculated value will cause the controller to have following error behind the desired position.
6.In the Move Type drop down box, check that the move type is set to Trapezoid.
7.Click in the Distance box and enter a distance for the step move. It is recommended to set a value that will cause the motor to make a few revolutions, for example 10.
Note: The distance depends on the scale set in section 5.3.3. If you set a scale so that units could be expressed in revolutions (or other unit of your choice), then those are the units that will be used here. If you did not set a scale, the amount you enter will be in encoder counts.
8. Click Go.
The NextMove PCI will perform the move and the motor will turn. As the soon as the move is completed, WorkBench v5 will download captured data from the NextMove PCI. The data will then be displayed in the Capture window as a graph.
Note: The graph that you see will not look exactly the same as the graph shown here! Remember that each motor has a slightly different response.
MN1903 | Operation |