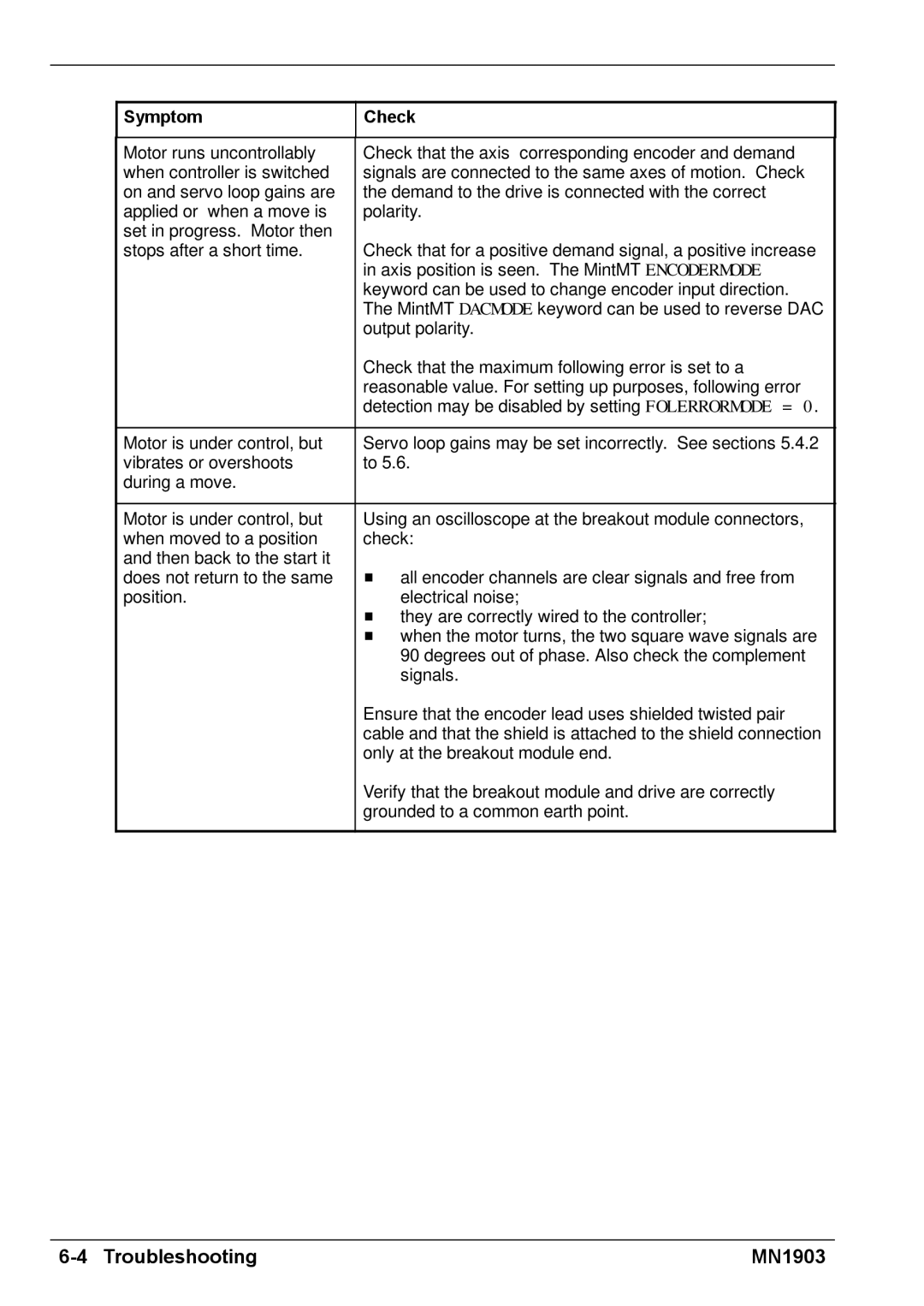
Symptom | Check |
|
|
Motor runs uncontrollably | Check that the axis’ corresponding encoder and demand |
when controller is switched | signals are connected to the same axes of motion. Check |
on and servo loop gains are | the demand to the drive is connected with the correct |
applied or when a move is | polarity. |
set in progress. Motor then |
|
stops after a short time. | Check that for a positive demand signal, a positive increase |
| in axis position is seen. The MintMT ENCODERMODE |
| keyword can be used to change encoder input direction. |
| The MintMT DACMODE keyword can be used to reverse DAC |
| output polarity. |
| Check that the maximum following error is set to a |
| reasonable value. For setting up purposes, following error |
| detection may be disabled by setting FOLERRORMODE = 0. |
|
|
Motor is under control, but | Servo loop gains may be set incorrectly. See sections 5.4.2 |
vibrates or overshoots | to 5.6. |
during a move. |
|
|
|
Motor is under control, but | Using an oscilloscope at the breakout module connectors, |
when moved to a position | check: |
and then back to the start it |
|
does not return to the same | H all encoder channels are clear signals and free from |
position. | electrical noise; |
| H they are correctly wired to the controller; |
| H when the motor turns, the two square wave signals are |
| 90 degrees out of phase. Also check the complement |
| signals. |
| Ensure that the encoder lead uses shielded twisted pair |
| cable and that the shield is attached to the shield connection |
| only at the breakout module end. |
| Verify that the breakout module and drive are correctly |
| grounded to a common earth point. |
|
|
MN1903 |