5.5 Servo axis - tuning for current control
5.5.1 Selecting servo loop gains
All servo loop parameters default to zero, meaning that the demand output will be zero at power up. Most servo amplifiers can be set to current (torque) control mode or velocity control mode; check that the servo amplifier will operate in the correct mode. The procedure for setting system gains differs slightly for each. To tune an axis for velocity control, go straight to section 5.7. It is recommended that the system is initially tested and tuned with the motor shaft disconnected from other machinery.
Note: The method explained in this section should allow you to gain good control of the motor, but will not necessarily provide the optimum response without further
1.In the Toolbox, click the
The
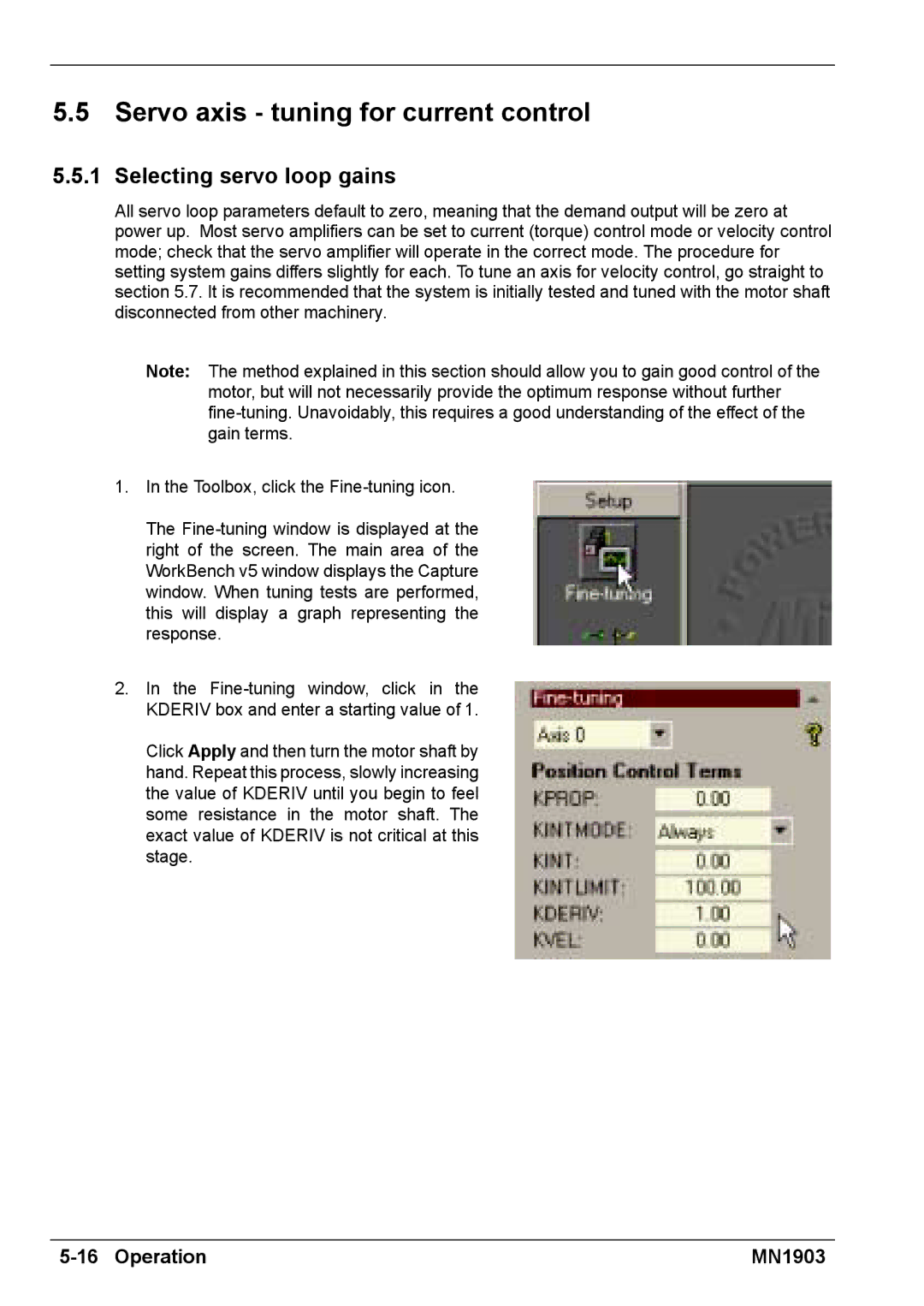
2.In the
Click Apply and then turn the motor shaft by hand. Repeat this process, slowly increasing the value of KDERIV until you begin to feel some resistance in the motor shaft. The exact value of KDERIV is not critical at this stage.
| MN1903 |