Installation, Operation Maintenance Instruction
4 HP
Safety Instructions
Otherwise, electric shock could occur
Otherwise, you may get an electric shock
Otherwise, fire could occur
Otherwise, it could result in a secondary accident and fire
Otherwise, fire or accident could occur
Operating Precautions
Page
Page
Contents
100
104
105
106
User Selection Guide Actionmaster Specifications
230V Class 0.5~5.4HP
460V Class 0.5~ 5.4HP
Motor Rating1 Output Capacity2 kVA
Control Method
Control
Installation
Inspection
008
Environmental Conditions
Other Precautions
Installation
Dimensions
Inverter
100 128 117.5 130.9
130 118 128 117.5 152.9
SV037ACtionMaster 150 138 128 117.5 155.0
Basic Wiring
Mccb
Power Terminals
Wiring Power Terminals Precautions on Wiring
Grounding Warning
Motor should be connected to the U, V, and W Terminals
Wires and Terminal Lugs
Screw Ring Terminals Wire6 Inverter Torque5 Mm2
Kgf·cm/lb-in
Control Terminals
30A 30C 30B
Control Circuit Terminal
Wiring Control Terminals Precautions on Wiring
Inside Inverter
Keypad Wiring the Keypad
Keypad Connector Pin Configuration Inverter Side
Pin No
Description
Keypad and Parameter Group Setting
Operation
Segment
RUN Key
Parameter Setting and Change
Procedures
Setting the DRV Group Data
Operation
Adjusting Function and I/O Group Data
Example Changing the F5 data to
Frequency
Trip Current
Parameter Group
Group Name Description
Moving Through DRV Group Codes
Moving Through Function Group Codes
Moving Through I/O Group Codes
Operation From Control Terminal
Operation
Operation From Keypad and Control Terminal
Operation From Keypad
Parameter List
Drive Group DRV
Function Group 1 FU1
Parameter List
FU1-53
50 / 60 Hz FU1-37
FU1-52
Function Group 2 FU2
FU2-3214
FU2-33
FU2-3415
FU2-36
FU2-83
FU2-85
FU2-88
FU2-89
Input/Output Group I/O
50 /60 Hz
Yes For Step Frequency Deceleration Time To 999.9 sec
Yes For Step Frequency Acceleration Time To 999.9 sec
Yes Deceleration Time To 999.9 sec
Yes Acceleration Time To 999.9 sec
Acceleration Time To 999.9 sec
Yes FM Frequency Meter Output Current Selection Voltage
Stall
Yes Reference Free Run
Yes Modbus-RTU
Bit
Related Functions DRV-04 Freq Mode FU1-20 Max Freq
Parameter Description
DRV-00 Output Frequency
DRV-01 Acceleration Time DRV-02 Deceleration Time
Parameter Description DRV DRV-03 Drive Mode Run/stop Method
DRV-04 Frequency Mode Frequency Setting Method
Select the source of Run/Stop command
Select the source of frequency setting
Parameter Description DRV
DRV-05 ~ DRV-07 Step Frequency 1 ~
DRV-08 Output Current
DRV-09 Motor Speed
DRV-12 Fault Display
Fault Contents
DRV-10 DC Link Voltage
DRV-11 User Display Selection
Page
Function 1 Group FU1
Parameter Description FU1
FU1-00 Jump to Desired Code #
FU1-03 Run Prevention
FU1-07 Stop Mode
Selects the stopping method for the inverter
Stop Mode ‘Free-run’
Output Frequency FU1-22 Time Output Voltage
Freq. limit ‘Yes’
Parameter Description FU1 FU1-29 Volts/Hz Pattern
FU1-30 ~ FU1-37 User V/F Frequency and Voltage
FU1-38 Output Voltage Adjustment
FU1-39 Energy Save Level
Motor i2t Characteristic Curve
FU1-54 Overload Warning Level FU1-55 Overload Warning Time
FU1-59 Stall Prevention Mode Selection
St bit
Parameter Description FU1 FU1-99 Return Code
This code is used to exit a group. Press Func key to exit
Function 2 Group FU2
Parameter Description FU2
FU2-00 Jump to Desired Code #
FU2-07 Dwell Frequency FU2-08 Dwell Time
FU2-19 Input/Output Phase Loss Protection Bit Set
FU2-10 ~ FU2-16 Frequency Jump
FU2-20 Power on Start Selection
FU2-21 Restart After Fault Reset
FU2-19 Phase Loss Protection Select
Setting Range
FU2-22 Speed Search Select
Motor Speed Time Output Frequency Output Voltage
FU2-39 Carrier Frequency
Output frequency = Reference freq. + Delta freq
Parameter Description FU2 FU2-40 Control Method Selection
This is to select the control method of inverter
FU2-70 Reference Frequency for Accel/Decel
Delta freq
FU2-72 Power On Display
Parameter Description FU2 FU2-71 Accel/Decel Time Scale
FU2-73 User Display Selection
FU2-74 Gain for Motor Speed Display
FU2-76 Duty of DB Dynamic Braking Resistor
FU2-79 Software Version
FU2-81 ~ FU2-90 2nd Motor Related Functions
Displays the software version
FU2-91 Parameter Read FU2-92 Parameter Write
FU2-93 Parameter Initialize
FU2-94 Parameter Write Protection
FU2-99 Return Code
Parameter Description FU2
01 ~ I/O-05 Analog Voltage Input V1 Signal Adjustment
06 ~ I/O-10 Analog Current Input I Signal Adjustment
Parameter Description I/O
00 Jump to Desired Code #
11 Criteria for Analog Input Signal Loss
Following table shows the selection in I/O-48
Speed-L, Speed-M, Speed-H
Step Parameter Speed-H Speed-M Speed-L
DC-Brake
2nd Function
Accel/Decel Parameter
Time
Wire
V1-Ext
Up, Down
Ext Trip-A
15 Terminal Input Status 16 Terminal Output Status
20 Jog Frequency
21 ~ I/O-24 Step Frequency 4, 5, 6
Analog Hold
Multi-Accel/Decel Time Operation
40 FM Frequency Meter Output 41 FM Adjustment
25 ~ I/O-38 1st ~ 7th Accel/Decel Time
42 FDT Frequency Detection Level 43 FDT Bandwidth
44 Multi-function Output define MO-MG
FDT-1
FDT-2
FDT-3
FDT-4
IOL
Stall
45 Fault Output Relay 30A, 30B, 30C
46 Inverter Number 47 Baud Rate
50 Communication Protocol Selection
99 Return Code 7-Segment Keypad
Introduction
Specifications
MODBUS-RTU Communication
Installation
Items Specifications
Connecting the communication line
System configuration
Operating
Communication Protocol Modbus-RTU
Function Code Name
Exception Code Name
Basic Format Command Message Request
Error Response Negative Acknowledge Response
Communication Protocol CMC-BUS Ascii
Normal Response Acknowledge Response
Negative Acknowledge Response
Detail Communication Protocol
Acknowledge Response
Request for Write
Request for Registration of ‘n’ numbers of Address
Error Code
Parameter Code List
Common Parameter Description Unit Read/Write Data value HEX
Value
Parameter Description
Read/Write Data value HEX
Description Default Max. value Min. value Unit
Retry delay
630A
180
SS I-Gain
Description Default Max. value Min value Unit
Group Parameter
Parameter Description Default Max. value Min value Unit
Troubleshooting
Refer to this chapter when a trouble is occurred
MODBUS-RTU Communication
Space
Ascii Code List
Character Hex
Display Protective Description
Troubleshooting & Maintenance
Fault Display
Troubleshooting & Maintenance
Fault Inverter Fault Reset
Fault Remedy
Protective Cause Remedy
Condition Check Point
How to Check Power Components
Elements Test Polarity Measured Value
Short
Module
Maintenance
Precautions
Routine Inspection
Periodical Inspection
Inspection Method Criterion Measuring Instrument
Daily and Periodic Inspection Items
Period Inspection
Fan
Troubleshooting & Maintenance
400V Class Model Number 004-4 008-4 015-4 022-4 037-4
Options
Braking Resistor
Phase
230V, or Phase 230/460V 50/60Hz
Options
DB Resistor2
DIN Rail Base
Unit mm
103
Appendix a Functions Based on the USE
Use Related Parameter Code
Appendix B- Peripheral Devices
Inverter
Declaration of Conformity
CD 73/23/EEC and CD 89/336/EEC
Safety of information technology equipment
Characteristics of information technology equipment
EN 50178
EN 55022
EMC Installation Guide
Essential Requirements for CE Compliance
109
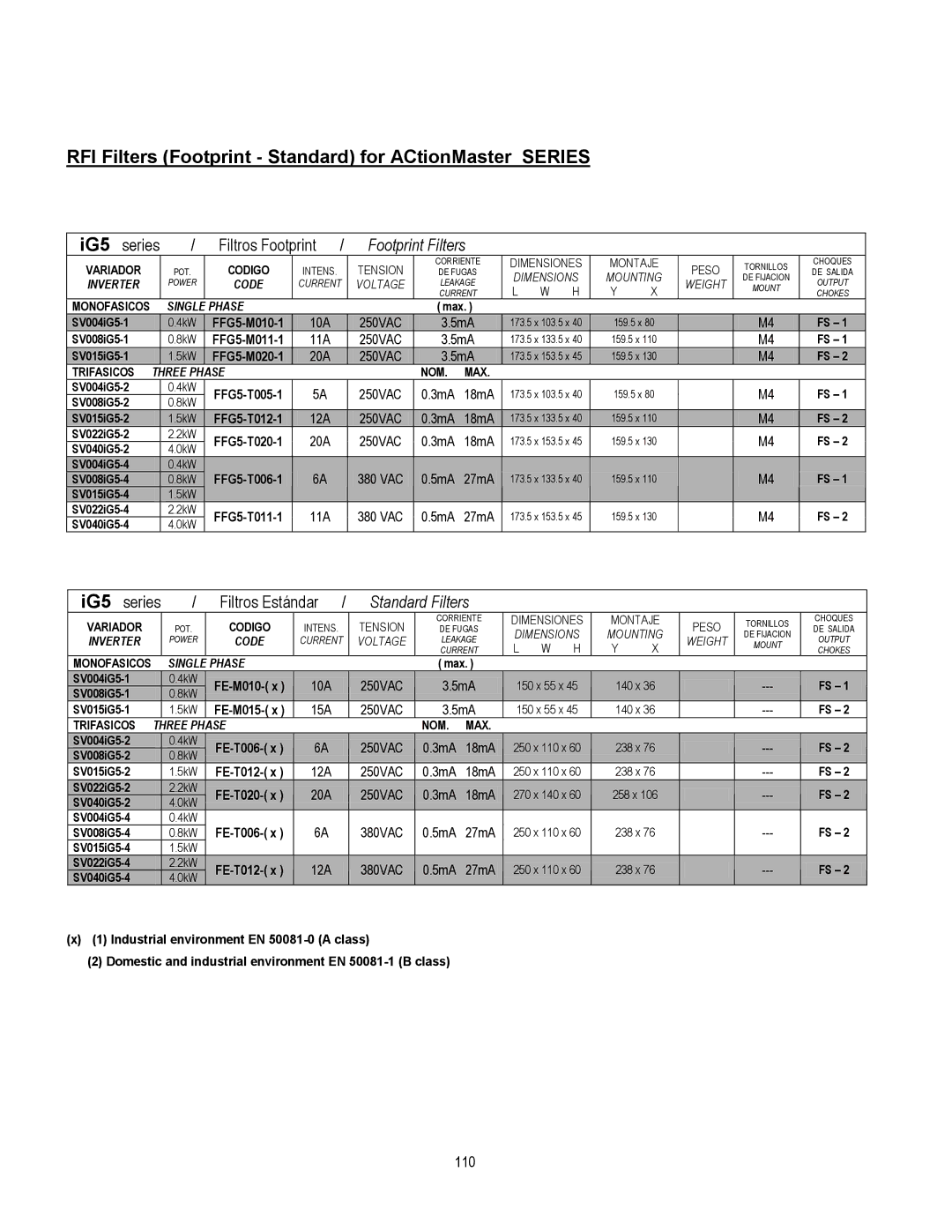
RFI Filters Footprint Standard for ACtionMaster Series
Footprint Filters
Revision History
Revision Date Remarks
112
Cleveland Motion Controls