KS152JB Universal Communications Controller Technical Specifications
Random Backoff
In either of the random algorithms, the first thing that happens after a collision is detected is that a I gets shifted into the TCDCNT (Transmit Collision Detect Count) register, from the right.
Thus if the software cleared TCDCNT before telling the GSC to transmit, then TCDCNT keeps track of how many times the transmission had to be aborted because of collisions:
TCDCNT = 00000000 | first attempt |
00000001 | first collision |
00000011 | second collision |
00000111 | third collision |
00001111 | fourth collision |
...................................... | |
11111111 | eighth collision |
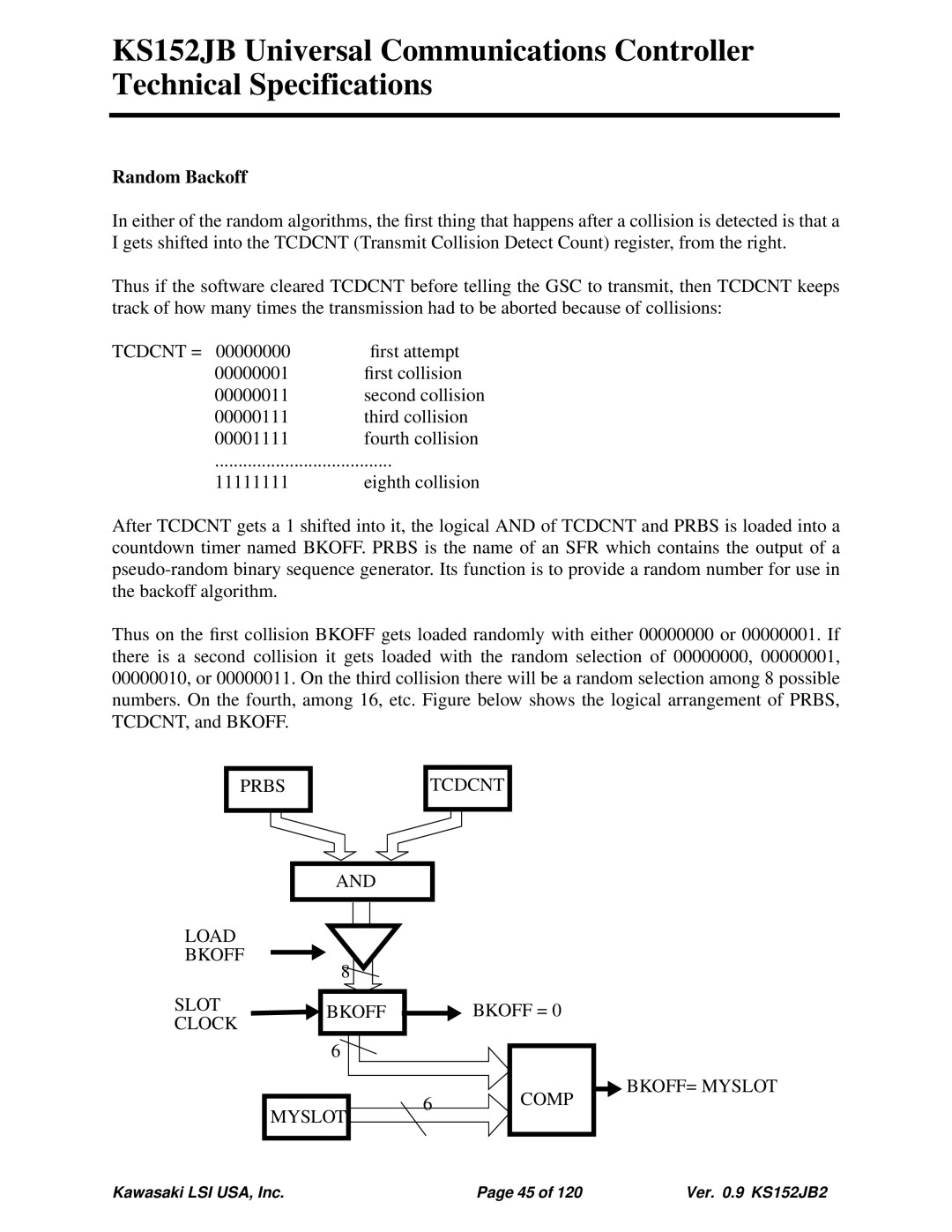
After TCDCNT gets a 1 shifted into it, the logical AND of TCDCNT and PRBS is loaded into a countdown timer named BKOFF. PRBS is the name of an SFR which contains the output of a
Thus on the first collision BKOFF gets loaded randomly with either 00000000 or 00000001. If there is a second collision it gets loaded with the random selection of 00000000, 00000001, 00000010, or 00000011. On the third collision there will be a random selection among 8 possible numbers. On the fourth, among 16, etc. Figure below shows the logical arrangement of PRBS, TCDCNT, and BKOFF.
PRBS |
| TCDCNT |
|
|
|
AND
LOAD
BKOFF
| 8 | |
SLOT | BKOFF | |
CLOCK | ||
| ||
| 6 | |
| MYSLOT |
![]() BKOFF = 0
BKOFF = 0
6 | COMP |
 BKOFF= MYSLOT
BKOFF= MYSLOT
Kawasaki LSI USA, Inc. | Page 45 of 120 | Ver. 0.9 KS152JB2 |