4.3.2Fine-tuning the speed loop
Before selecting the servo (position) loop gains, the speed loop gains might need to be fine tuned.
Note: MCT will have created starting values for the speed loop gains, so if you are not sure which values to adjust, you can go straight to section 4.3.3 on page 57.
If you wish to change any of the speed loop gains:
1.Click the Speed Loop Tuning tab ![]()
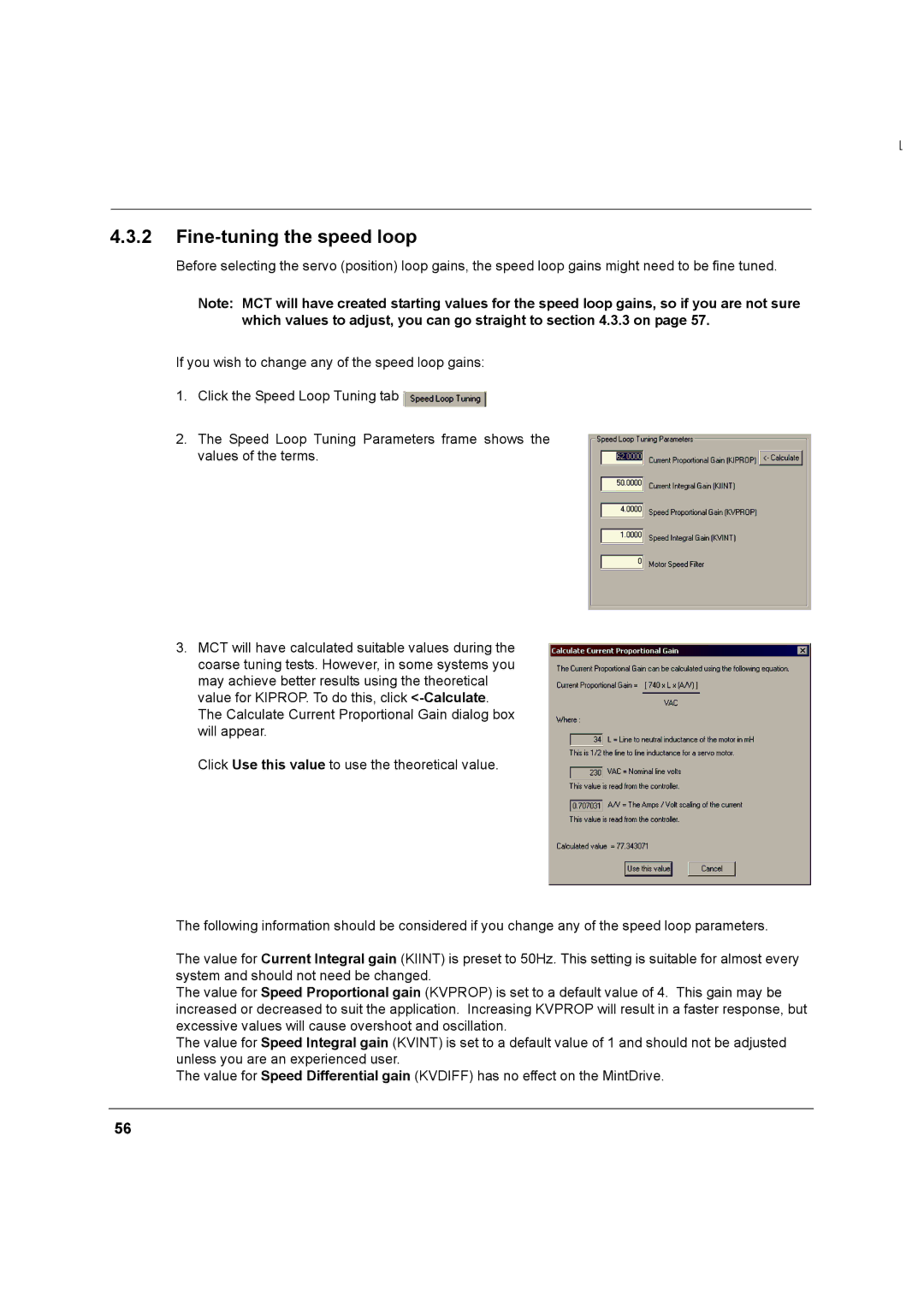
2.The Speed Loop Tuning Parameters frame shows the values of the terms.
3.MCT will have calculated suitable values during the coarse tuning tests. However, in some systems you may achieve better results using the theoretical value for KIPROP. To do this, click
Click Use this value to use the theoretical value.
The following information should be considered if you change any of the speed loop parameters.
The value for Current Integral gain (KIINT) is preset to 50Hz. This setting is suitable for almost every system and should not need be changed.
The value for Speed Proportional gain (KVPROP) is set to a default value of 4. This gain may be increased or decreased to suit the application. Increasing KVPROP will result in a faster response, but excessive values will cause overshoot and oscillation.
The value for Speed Integral gain (KVINT) is set to a default value of 1 and should not be adjusted unless you are an experienced user.
The value for Speed Differential gain (KVDIFF) has no effect on the MintDrive.
56