MN1274 06/2001
Installation Manual
Page
Iii
Safety Notice
Circuit amperes listed here at rated voltage
Page
Contents
Viii
Input / Output
Mint WorkBench
Appendices
Tuning
129
Xii
Introduction
MintDrive features
Identifying the catalog number
Receiving and inspection
Date
Meaning Alternatives
Monitor LED display
MintDrive indicators
Can 1 and 2 LEDs
Ready LED
Units and abbreviations
Outline
You must read all the sections in Basic Installation
Hardware requirements
Each step should be followed in sequence
CBL
Other information needed for installation
Power sources
2 RS485 / RS422 systems
Tools and miscellaneous hardware
Mechanical installation and location requirements
Package dimensions
Dimensions and mounting
Power connections
Single phase units
Grounding
MintDrive
Input power conditioning
Power disconnect and protection devices
Ungrounded distribution systems
Circuit breaker and fuse, single phase, package size C
Delay
Wire sizes
Single phase connection to package size C
Single phase connection to package size a or B
Three phase connection to package size C
8 24V control supply
Input current
Output voltage
DC Bus power connections from package size C
MintDrive
External drive
Power supply filters
Nominal output voltage
Motor connections
Motor circuit contactors
Regeneration resistor Dynamic Brake resistor
Regeneration resistor mounting
Baldor regeneration resistor catalog numbers
Feedback connections
Resolver option
Pin Resolver function
Baldor Motor
Signal name Motor / cable Resolver cable wire Pin Color
Resolver cable pin configuration
Pin Encoder function
Encoder option
This completes the basic installation
Drive enable
Analog I/O
Input / Output
Mint keyword
Analog Input, Single Ended
ADC.2
Description
ADC.3
Analog Input, Differential
Pins Name
Analog Inputs, Differential
ADC.0 ADC.1
Page
AUXDAC.2 AUXDAC.3
Analog Outputs, Bipolar
AOUT0 and AOUT1 analog outputs
AUXDAC.0 AUXDAC.1
Digital I/O
Digital Inputs
Pin Name Mint keyword
External +24VDC supply Active high =+24VDC =0V Active low
X13
Thermal switch connection
X5 Digital inputs
External +24VDC supply Active high A=+24VDC B=0V Active low
Special functions on inputs DIN0 and DIN2
Breakout board
Input Function
OUT.5
Digital Outputs
OUT.6
OUT.7
OUT.2
OUT.4
OUT.0
OUT.3
Simulated encoder output
Other I/O
Pin Name
MintDrive NextMoveBX encoder input
Differential encoder connections
Master auxiliary encoder input
Auxiliary encoder circuit
Pin RS232 Name RS485 / RS422 name
Serial port
RS232 serial port connections
Using RS232 cable
Master Controller
Multidrop using RS485 / RS422 cable
Baldor HMI PLC Port
Connecting Baldor HMI Operator Panels
Can peripherals
Optional breakout board for connector
Installing the software
Connecting the MintDrive to the PC
Starting the MintDrive
Mint Configuration Tool Startup Wizard coarse tuning
Page
Page
An introduction to closed loop control
MCT Startup Wizard fine-tuning
Page
Fine-tuning the speed loop
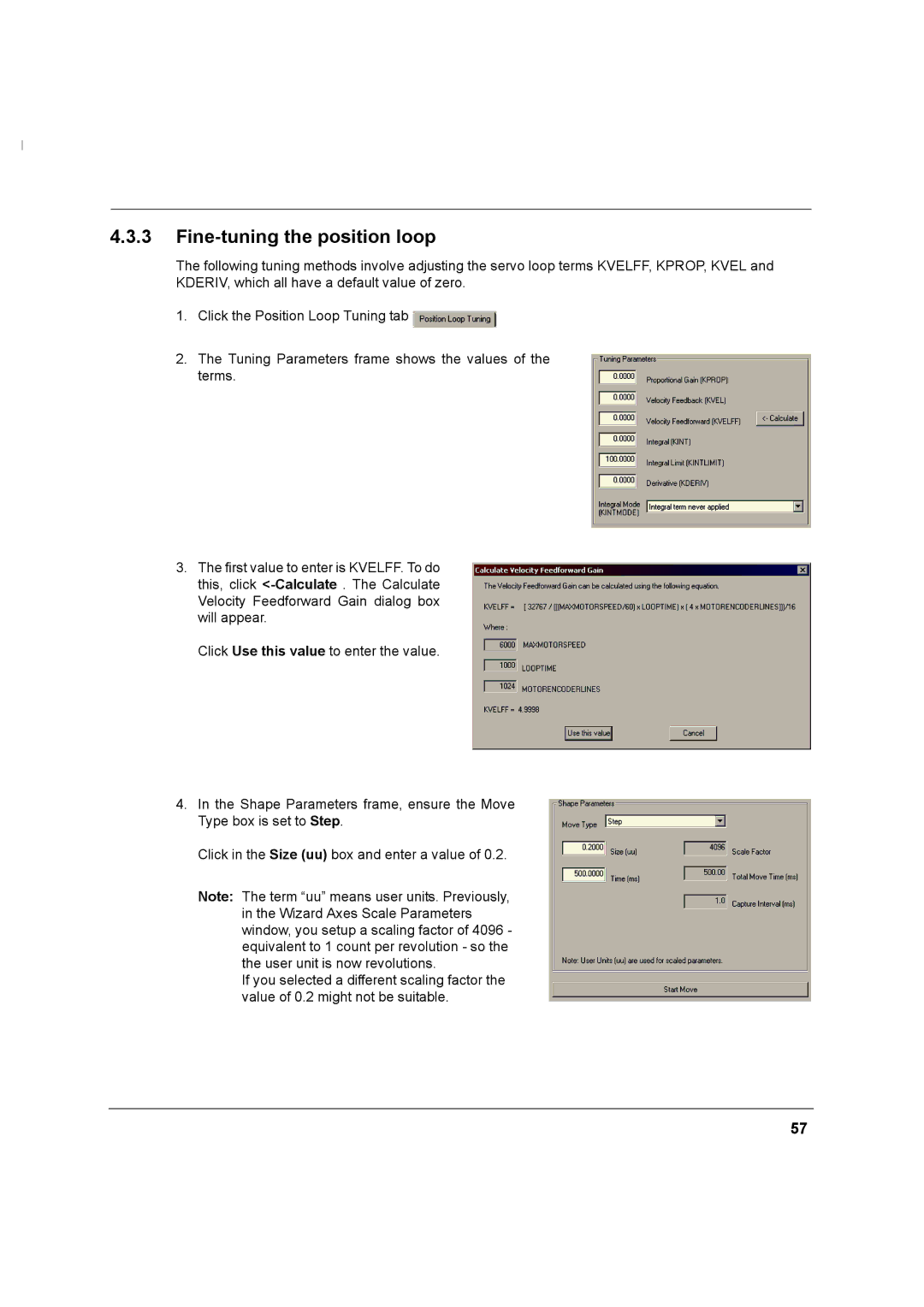
Fine-tuning the position loop
Click Start Move
Jog test
Completing the Startup Wizard
Click Mint Configuration Tool in Wizard Mode
Digital input configuration
MCT Wizard hardware configuration
Digital output configuration
Axis0 error configuration
Axis0 parameter configuration
Miscellaneous configuration
Axis0 tuning configuration
Completing the configuration wizard
Page
Mint WorkBench
Completing configuration
Selecting the controller
Using WorkBench
Menus and buttons
Standard toolbar functions
Macro toolbar functions
Motion toolbar functions
Status bar
Can window
Quick Watch tab
Watch window
740 × L × A∕V
Speed Loop tab
Position Loop tab
Capture tab
Configuration window
Editor windows
Program window
Terminal window
Useful commands for testing
To start the motor turning slowly, type
To stop the motor turning, type
Combining commands on one line
To turn a distance of 5 turns, type
To change the speed, type
CON
Firmware update
NEW
Prog
Page
General specifications
Specifications
Power
Resolver feedback
Rectifier and regeneration
Encoder feedback
Control signals
Environmental
Page
Problem diagnosis
Troubleshooting
Communication
Problem Check
Corrupted. Use Release
Power up
Data Defaulting to
Tuning
Mint gains
Config = cfCURRENTAMPLIFIER
Print Drivefault
Code Problem Check
Ready LED is red
Parameter
Code Problem Check
7 can
Problem Check
Page
Purpose Name Abbreviation / keyword
Tuning a Introduction
Figure A.1 MintDrive Closed Loop System
Closed loop control
100
Position loop
Current loop
Speed loop
MintDrive operational modes
101
Tuning the position loop for a servo drive
Tuning the position loop for a velocity servo drive
Position Loop gain terms
102
KINTMODE=2
103
Position Loop Tuning using a step move
Position Loop Tuning using a trapezoidal move type
104
Saving tuning information
Tuning the position loop for a torque servo drive
CONFIG=6
105
106
MintDrive capabilities
107
Cable length Maximum bit rate Resistance Conductor area
108
Can 1 CANopen
Can 1 CANopen
109
Pin Name Description
What is CANopen?
110
Type Mint Constant Node Type
Network manager node
Configuring nodes
Scanning nodes
111
Connecting to nodes
112
? NODELIVE.1.2 ? NODETYPE.1.2
Monitoring can events
113
Event Number Mint Constant
Singlecast communication
Controller nodes
Broadcast communication
114
9 I/O nodes
Digital I/O access
Comms array subroutines
115
Analog I/O Access
Extra Analog I/O Functionality
116
HMI Operator Panels
117
REMOTEADCDELTA.1.2.3 =
118
Can 2 Baldor can
Can 2 Baldor can
119
Preparing the MintDrive
Connecting the PC, MintDrive and can peripheral
Preparing the can peripheral
120
Node type Type Mint Constant Default Node ID Baud rate
Static configuration
Remotesetup
Node IDs
Adding the node to the network
122
NODETYPE.7 =
Controlling the can peripheral
Monitoring can Bus communications
Normal operation
123
124
KeypadNode
BUS=2
Pause NODELIVE.14
125
IoNode 24/24
126
Example can network
NODESCAN.0
View NODELIVE.2
Mint can related keywords
Using abbreviations
127
Keyword Abbreviation
128
129
Declaration of Conformity
EMC Conformity and CE marking
EMC wiring technique
Use of CE compliant components
130
131
EMC installation suggestions
EMC filters
Grounding Earth
132
Wiring of shielded screened cables
Figure C.4 Handwheel Encoder cable grounding
Figure C.5 Encoder signal cable grounding
134
Cable Cable assembly Baldor catalog number Length
Cables
135
136
Resolver feedback cable
EMC mains filters
Filter dimensions FN351-36-33 and FN351-50-33
Catalog numbers
137
Dimensions inches mm
Dimension FN2070-6-06
138
139
Regeneration resistors
Baldor catalog number MintDrive
115VAC drives 230VAC drives Baldor
140
Breakout board
Page
MN1274 06/2001