2Unpacking to Installation
Carry out the following procedure after installing the controller referring to the separate "Controller Setup, Basic Operation and Maintenance" manual.
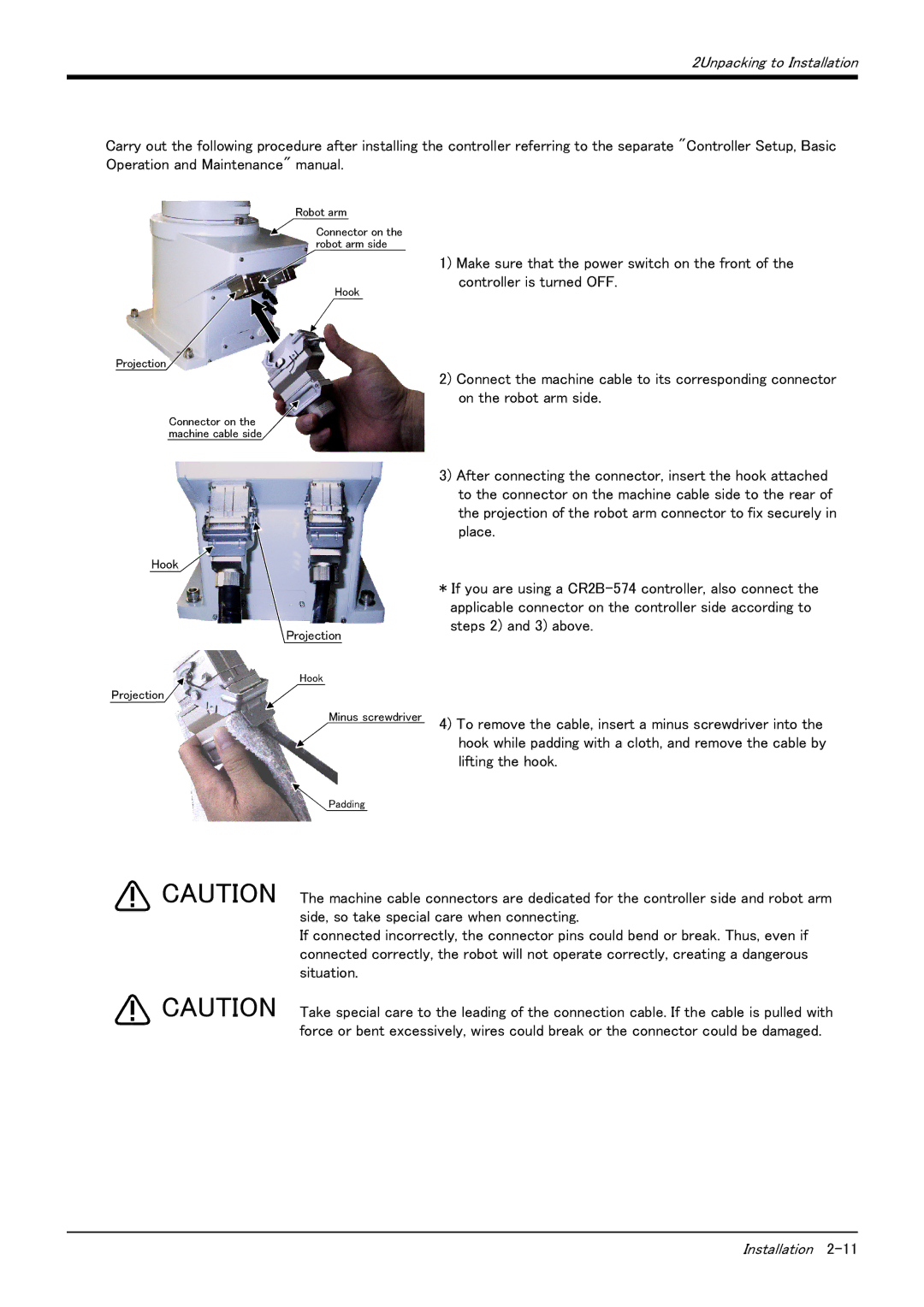
Robot arm
Connector on the robot arm side
Hook
Projection
Connector on the machine cable side
1)Make sure that the power switch on the front of the controller is turned OFF.
2)Connect the machine cable to its corresponding connector on the robot arm side.
Hook
Projection
3) After connecting the connector, insert the hook attached to the connector on the machine cable side to the rear of the projection of the robot arm connector to fix securely in place.
* If you are using a
Hook
Projection
Minus screwdriver
Padding
4)To remove the cable, insert a minus screwdriver into the hook while padding with a cloth, and remove the cable by lifting the hook.
CAUTION The machine cable connectors are dedicated for the controller side and robot arm side, so take special care when connecting.
If connected incorrectly, the connector pins could bend or break. Thus, even if connected correctly, the robot will not operate correctly, creating a dangerous situation.
CAUTION Take special care to the leading of the connection cable. If the cable is pulled with force or bent excessively, wires could break or the connector could be damaged.
Installation