3Installing the option devices
3.4 .Changing the operating range
The operating range of the J1 axis can be changed to the range shown in Table
Table
|
| Axis | Standard |
|
| Alternative angle |
| ||
|
|
|
|
|
|
|
|
|
|
|
| +side | Angle | +170 | +135 | +90 |
| +45 | One of the points shown |
|
|
|
|
|
|
|
| on the left | |
|
| Insertion position | None | A | B |
| C | ||
|
|
|
| ||||||
J | 1 |
|
|
| |||||
|
|
|
|
|
|
|
| ||
Angle |
| One of the points shown | |||||||
|
|
| |||||||
|
|
|
|
|
|
|
| on the left | |
|
| Insertion position | None | a | b |
| c | ||
|
|
|
| ||||||
|
|
|
|
| |||||
|
|
|
|
|
|
|
|
|
|
Note) The insertion position given in the table indicates the insertion position for the operating range change stopper. (Refer to Fig.
The operating range is changed with robot arm settings and parameter settings.
(1)Setting the robot arm
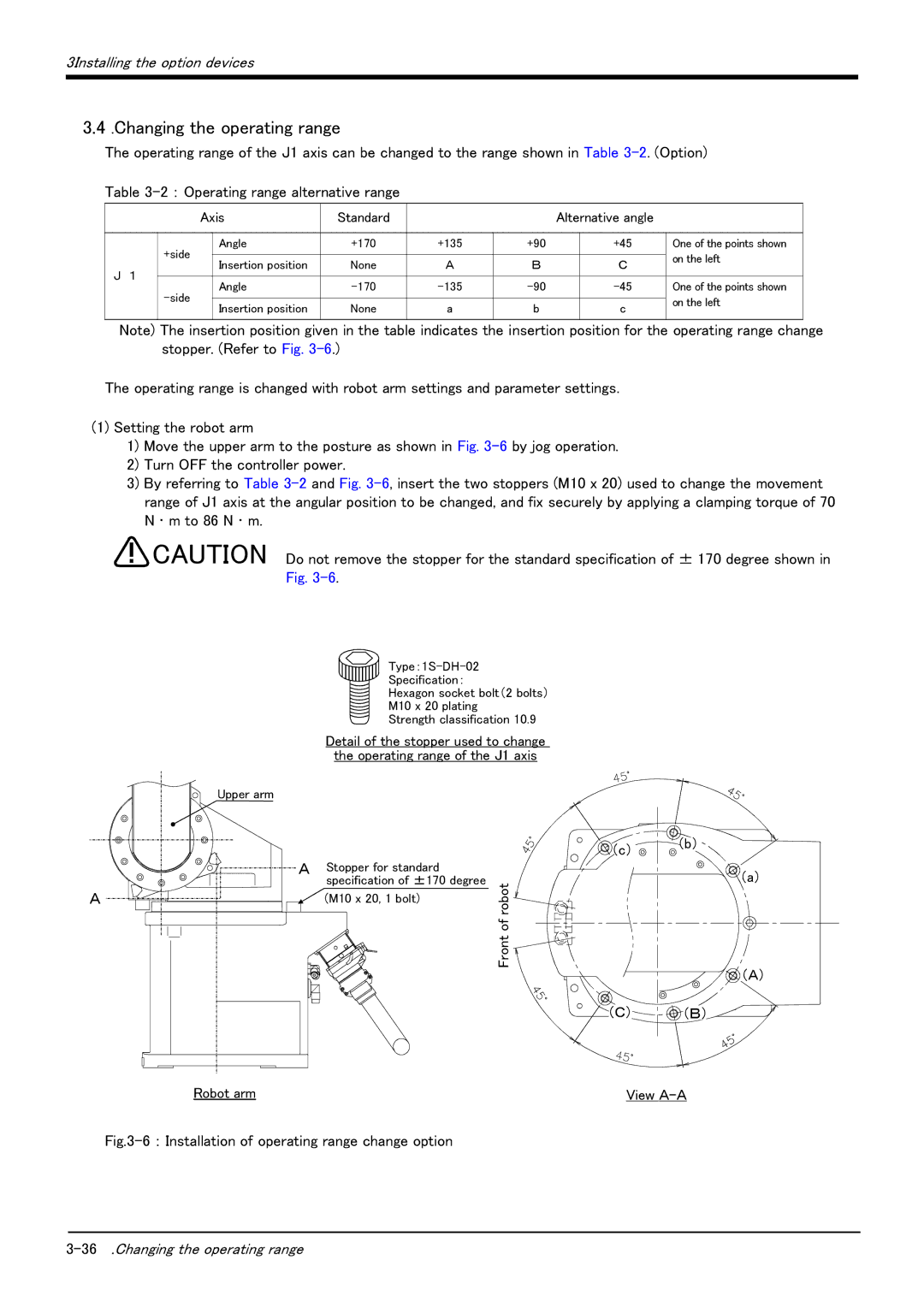
1)Move the upper arm to the posture as shown in Fig.
2)Turn OFF the controller power.
3)By referring to Table
![]()
![]()
![]() CAUTION Do not remove the stopper for the standard specification of ± 170 degree shown in Fig.
CAUTION Do not remove the stopper for the standard specification of ± 170 degree shown in Fig.
Specification:
Hexagon socket bolt(2 bolts)
M10 x 20 plating
Strength classification 10.9
Detail of the stopper used to change the operating range of the J1 axis
Upper arm |
|
A | Stopper for standard |
| specification of ±170 degree |
A | (M10 x 20, 1 bolt) |
|
|
|
|
|
|
| (b) | ||
| (c) |
| (a) | |
|
|
| ||
Front of robot |
|
| ||
|
| (A) | ||
|
|
|
| |
![]()
![]()
![]() (C)
(C)![]()
![]()
![]()
![]() (B)
(B) ![]()
![]()
![]()
![]()
![]()
Robot arm | View |