2Unpacking to Installation
(1)JOINT jog operation
Select the JOINT jog mode
JOINT | LOW |
|
|
|
|
|
|
|
|
|
|
|
J1 | +34.50 |
|
|
|
|
|
| STEP |
|
| JOINT | |
J2 | +20.00 |
|
|
|
|
|
|
| + | |||
|
|
|
|
|
| MOVE | ||||||
J3 | +80.00 |
| JOINT jog mode |
|
|
|
| ( )? |
| |||
|
|
|
|
|
|
|
|
| ||||
Set the jog speed |
|
|
|
|
|
|
|
|
|
|
| |
JOINT | LOW |
|
|
|
|
|
|
|
|
|
|
|
J1 | +34.50 |
|
| STEP |
|
|
| + |
|
| - |
|
J2 | +20.00 |
|
| + |
|
|
| |||||
|
| MOVE |
| FORWD |
|
| BACKWD | |||||
|
|
|
|
|
|
|
|
| ||||
J3 | +80.00 | Set the speed |
|
|
|
|
|
|
|
| ||
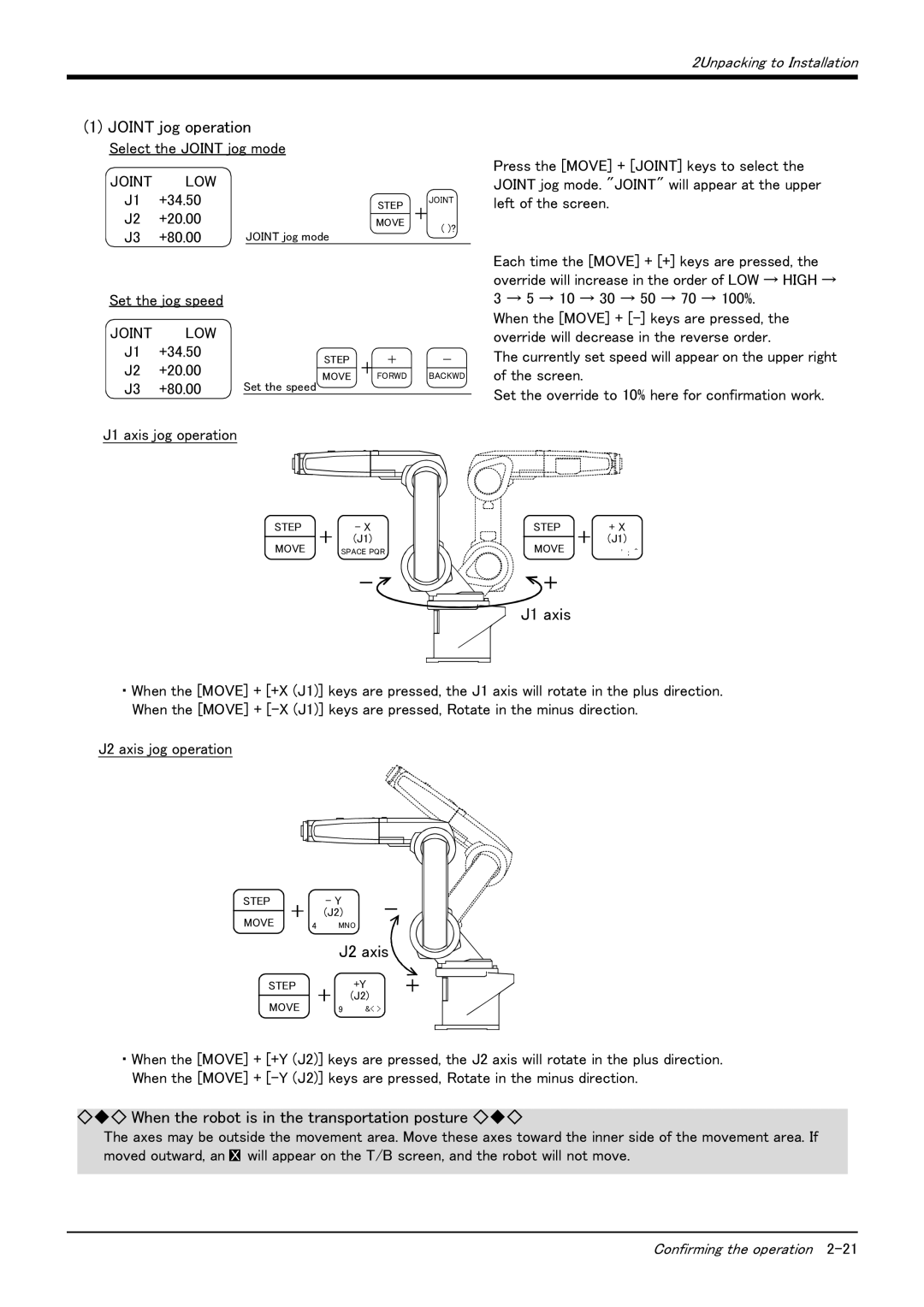
J1 axis jog operation
Press the [MOVE] + [JOINT] keys to select the JOINT jog mode. "JOINT" will appear at the upper left of the screen.
Each time the [MOVE] + [+] keys are pressed, the override will increase in the order of LOW → HIGH → 3 → 5 → 10 → 30 → 50 → 70 → 100%.
When the [MOVE] +
The currently set speed will appear on the upper right of the screen.
Set the override to 10% here for confirmation work.
STEP | + | - X | STEP | + | + X |
MOVE | (J1) | MOVE | (J1) | ||
| SPACE PQR |
| ' ; ^ |
- 





















 +
+ 


 J1 axis
J1 axis
・ When the [MOVE] + [+X (J1)] keys are pressed, the J1 axis will rotate in the plus direction. When the [MOVE] +
J2 axis jog operation
STEP | + | - Y |
MOVE | (J2) | |
| 4 MNO |
J2 axis
STEP | + | +Y |
MOVE | (J2) | |
| 9 &< > |
・ When the [MOVE] + [+Y (J2)] keys are pressed, the J2 axis will rotate in the plus direction. When the [MOVE] +
◇◆◇ When the robot is in the transportation posture ◇◆◇
The axes may be outside the movement area. Move these axes toward the inner side of the movement area. If moved outward, an XX will appear on the T/B screen, and the robot will not move.
Confirming the operation