6Appendix
6 Appendix
Appendix 1 : Configuration flag
The configuration flag indicates the robot posture.
For the
The types of configuration flags are shown below.
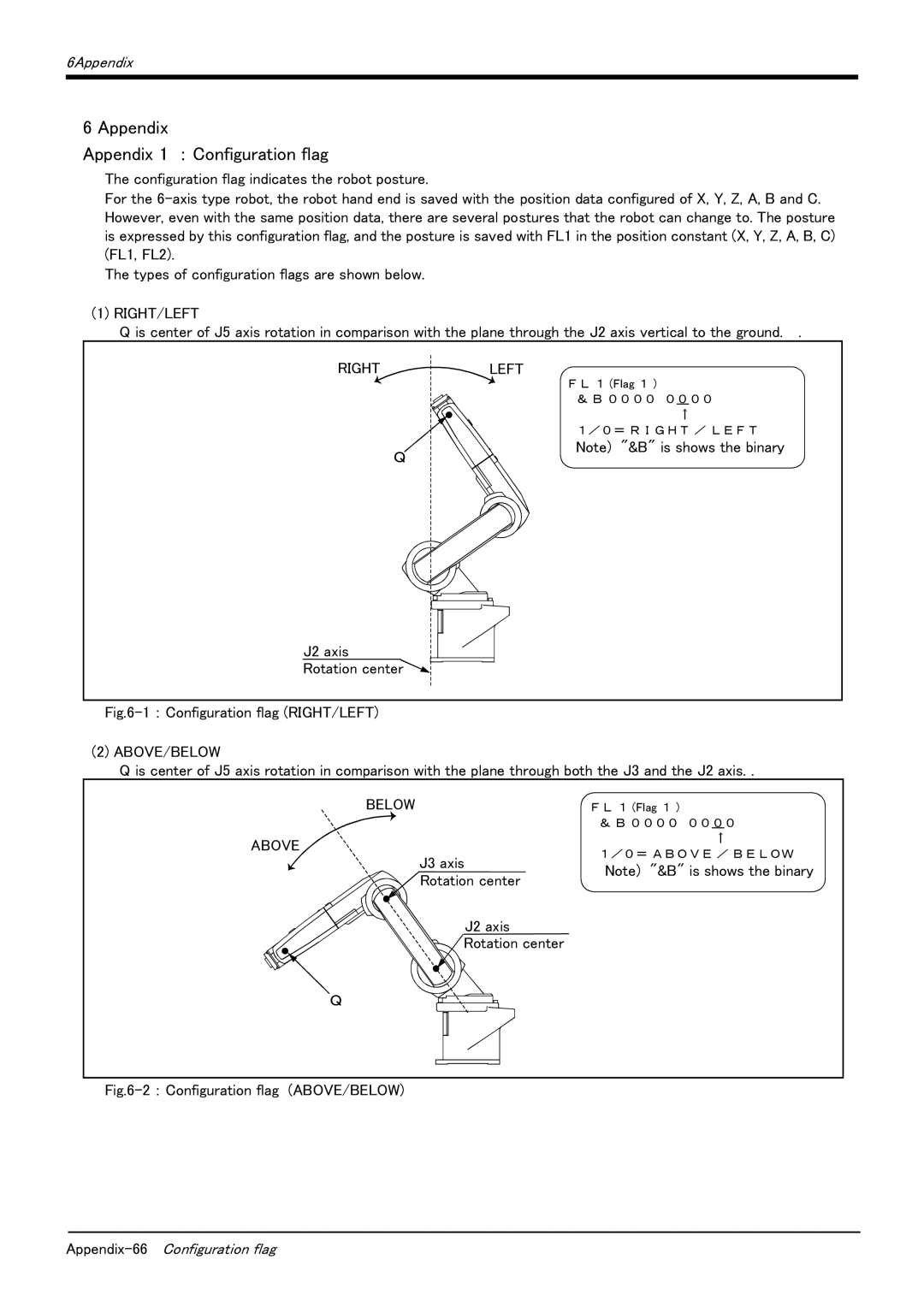
(1) RIGHT/LEFT
Q is center of J5 axis rotation in comparison with the plane through the J2 axis vertical to the ground. .
RIGHT | LEFT |
|
|
|
|
|
| F L | 1 | (Flag 1 ) |
|
|
|
| & B | 0 0 0 0 | 0 0 0 0 | |||
|
|
|
|
|
|
|
| ↑ |
| 1 / 0 = R I G H T / L E F T |
Q | Note) "&B" is shows the binary |
|
J2 axis
Rotation center
Fig.6-1 : Configuration flag (RIGHT/LEFT)
(2) ABOVE/BELOW
Q is center of J5 axis rotation in comparison with the plane through both the J3 and the J2 axis. .
BELOW | F L | 1 | (Flag 1 ) |
|
|
|
| & | B | 0 0 0 0 | 0 0 0 0 | ||
|
|
|
|
|
|
|
ABOVE |
| ↑ |
| 1 / 0 = A B O V E / B E L O W | |
| J3 axis | |
| Note) "&B" is shows the binary | |
| Rotation center | |
|
|
J2 axis
![]()
![]() Rotation center
Rotation center
Q