2Unpacking to Installation
(5)CYLNDER jog operation
Select the cylindrical jog mode
CYLNDER | LOW |
|
|
|
|
|
|
|
|
|
|
| |
R | +134.50 |
|
|
|
| STEP |
|
| XYZ | ||||
|
|
|
|
|
|
|
|
| |||||
T | +220.00 |
|
|
|
| + |
|
|
| ||||
|
|
|
| MOVE | $": |
|
| ||||||
Z | +280.00 |
| CYLNDER jog mode |
|
|
|
|
|
|
| |||
Set the jog speed |
|
|
|
|
|
|
|
|
|
|
| ||
CYLNDER | LOW |
|
|
|
|
|
|
|
|
|
|
| |
R | +134.50 |
|
| STEP |
|
| + | - | |||||
T | +220.00 |
|
|
|
| ||||||||
|
|
|
|
|
|
|
|
|
|
| |||
|
| MOVE | + FORWD | BACKWD | |||||||||
Z | +280.00 |
|
| ||||||||||
Set the speed |
|
|
|
|
|
|
|
| |||||
Press the [MOVE] + [XYZ] keys, and then press only the [XYZ] key. "CYLNDER" will appear at the upper left of the screen.
Each time the [MOVE] + [+] keys are pressed, the override will increase in the order of LOW → HIGH → 3 → 5 → 10 → 30 → 50 → 70 → 100%. When the [MOVE] +
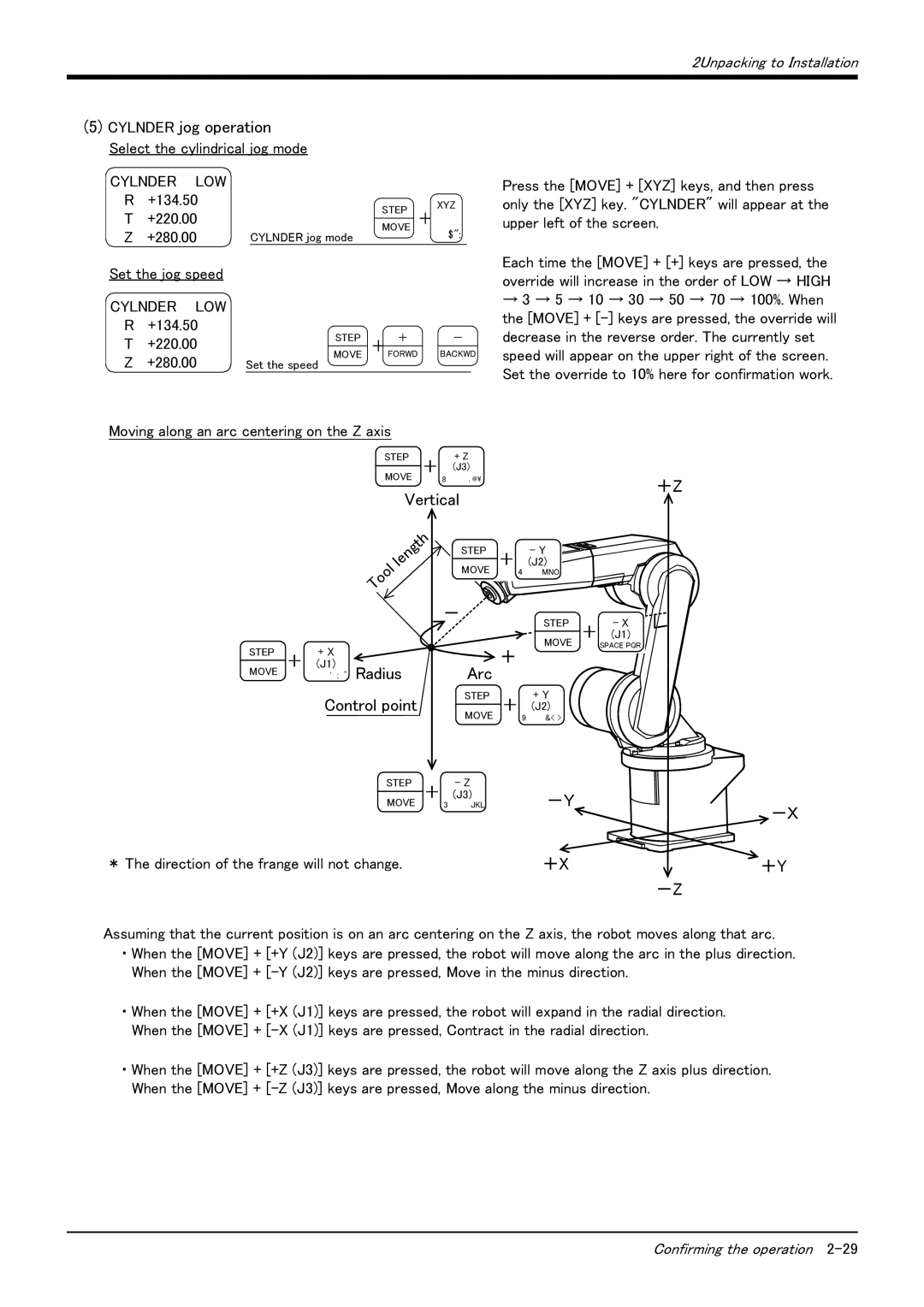
Moving along an arc centering on the Z axis
STEP | + |
| + Z |
| |
MOVE |
| (J3) |
| ||
| 8 | , @\ | +Z | ||
Vertical | |||||
| |||||
|
| h |
|
| t |
|
| g |
| n | |
| le |
|
| l |
|
| o |
|
o |
| |
T |
|
|
STEP | + |
| - Y |
MOVE |
| (J2) | |
| 4 | MNO |
STEP | + | + X |
|
MOVE | (J1) | Radius | |
| ' ; ^ |
Control point
STEPMOVE +
* The direction of the frange will not change.
- |
|
|
|
|
|
|
|
| STEP | + | - X |
| |
|
|
|
| |||
|
|
| MOVE | (J1) |
| |
| + |
|
| SPACE PQR |
| |
Arc |
|
|
|
|
| |
|
|
|
|
| ||
|
|
|
|
|
| |
STEP | + | + Y |
|
|
| |
MOVE | (J2) |
|
|
| ||
9 | &< > |
|
|
| ||
- Z |
|
|
|
|
|
|
(J3) |
|
| -Y |
|
|
|
3 JKL |
|
|
|
| -X | |
|
|
|
|
|
| |
+X+Y
-Z
Assuming that the current position is on an arc centering on the Z axis, the robot moves along that arc.
・ When the [MOVE] + [+Y (J2)] keys are pressed, the robot will move along the arc in the plus direction. When the [MOVE] +
・ When the [MOVE] + [+X (J1)] keys are pressed, the robot will expand in the radial direction. When the [MOVE] +
・ When the [MOVE] + [+Z (J3)] keys are pressed, the robot will move along the Z axis plus direction. When the [MOVE] +
Confirming the operation