Library Overview
Library robotics
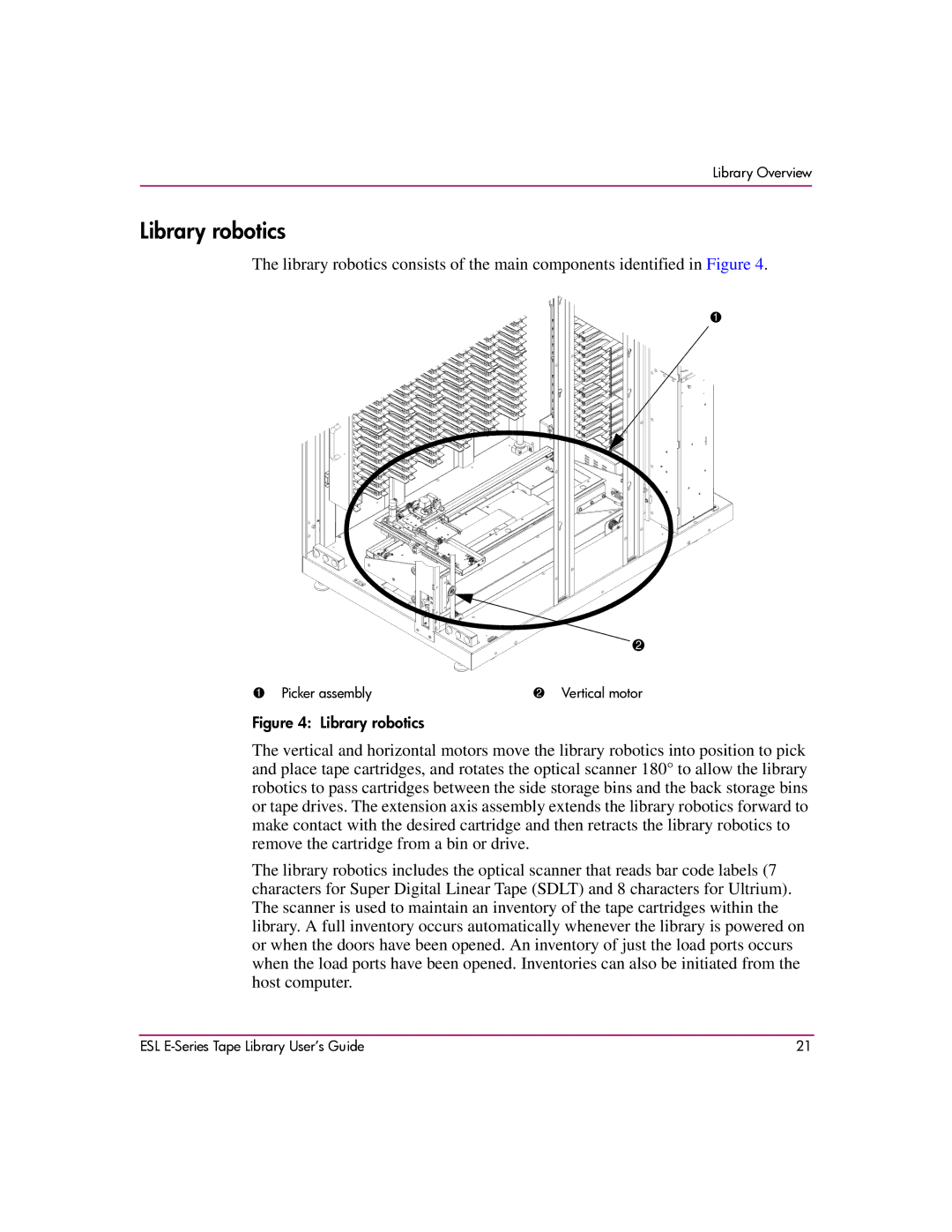
The library robotics consists of the main components identified in Figure 4.
1
2
1 Picker assembly | 2 Vertical motor |
Figure 4: Library robotics
The vertical and horizontal motors move the library robotics into position to pick and place tape cartridges, and rotates the optical scanner 180° to allow the library robotics to pass cartridges between the side storage bins and the back storage bins or tape drives. The extension axis assembly extends the library robotics forward to make contact with the desired cartridge and then retracts the library robotics to remove the cartridge from a bin or drive.
The library robotics includes the optical scanner that reads bar code labels (7 characters for Super Digital Linear Tape (SDLT) and 8 characters for Ultrium). The scanner is used to maintain an inventory of the tape cartridges within the library. A full inventory occurs automatically whenever the library is powered on or when the doors have been opened. An inventory of just the load ports occurs when the load ports have been opened. Inventories can also be initiated from the host computer.
ESL | 21 |