Section C: Integrating the core “flying saw” functions
Program environment and interfaces
Flying Saw with SIMOTION |
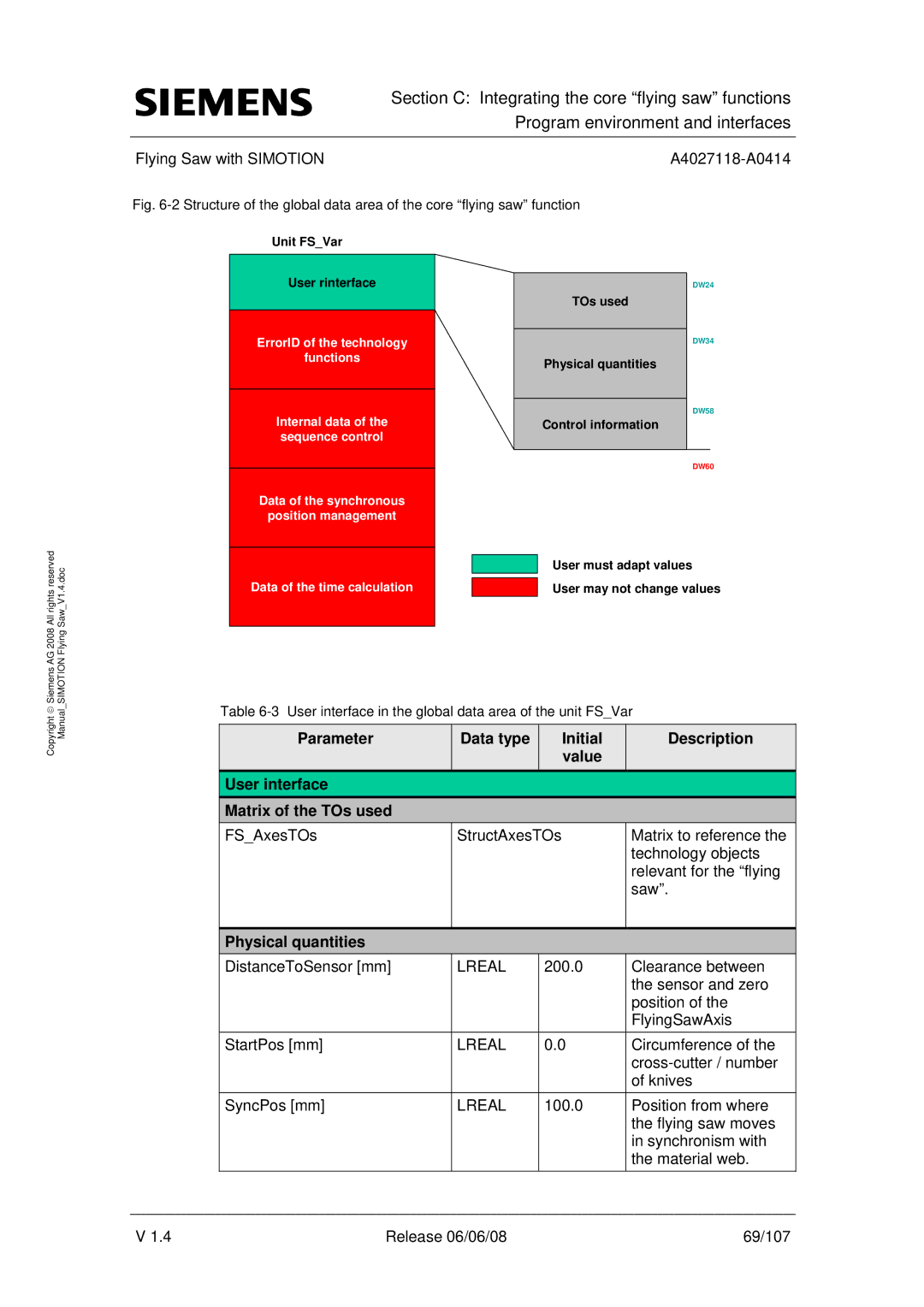
Fig. 6-2 Structure of the global data area of the core “flying saw” function
All rights reserved | Saw V1.4.doc |
Siemens AG 2008 | SIMOTION Flying |
Unit FS_Var
User rinterface
ErrorID of the technology
functions
Internal data of the sequence control
Data of the synchronous
position management
Data of the time calculation
DW24
TOs used
DW34
Physical quantities
DW58
Control information
DW60
User must adapt values
User may not change values
Copyright ♥ Manual_ |
Table
Parameter | Data type | Initial | Description |
|
| value |
|
User interface |
|
|
|
Matrix of the TOs used |
|
|
|
FS_AxesTOs | StructAxesTOs |
|
|
Physical quantities
Matrix to reference the technology objects relevant for the “flying saw”.
DistanceToSensor [mm] | LREAL | 200.0 | Clearance between |
|
|
| the sensor and zero |
|
|
| position of the |
|
|
| FlyingSawAxis |
StartPos [mm] | LREAL | 0.0 | Circumference of the |
|
|
| |
|
|
| of knives |
SyncPos [mm] | LREAL | 100.0 | Position from where |
|
|
| the flying saw moves |
|
|
| in synchronism with |
|
|
| the material web. |
V 1.4 | Release 06/06/08 | 69/107 |