All rights reserved | Saw V1.4.doc |
Copyright ♥ Siemens AG 2008 | Manual SIMOTION Flying |
Section C: Integrating the core “flying saw” functions
Using the "FB_BGD_TEMPLATE_FlyingSaw()"
Flying Saw with SIMOTION |
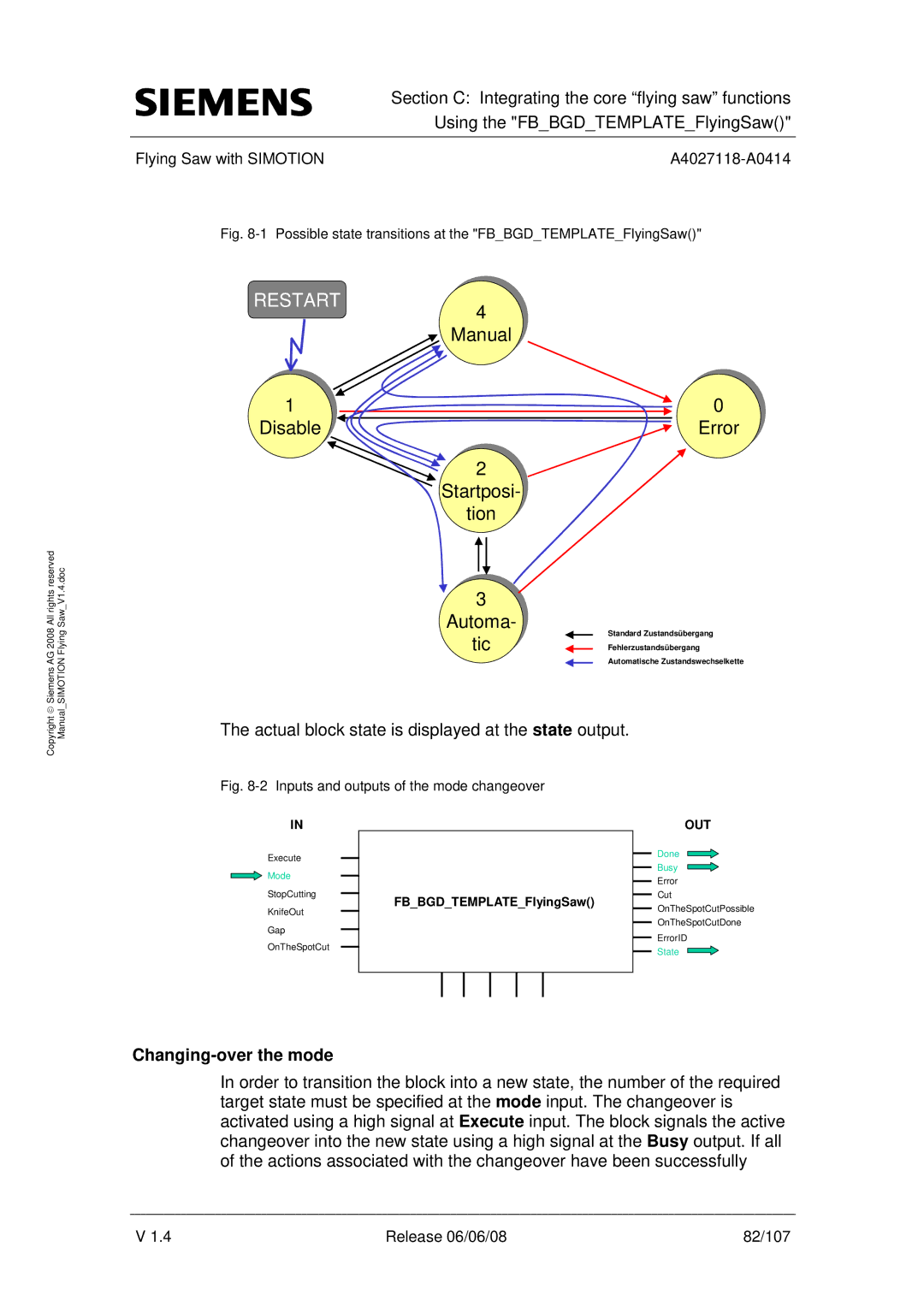
Fig. 8-1 Possible state transitions at the "FB_BGD_TEMPLATE_FlyingSaw()"
RESTART | 4 |
| 4 |
| Manual |
| Manual |
1 | 0 |
1 | 0 |
Disable | Error |
Disable | Error |
| 2 |
| 2 |
| Startposi- |
| Startposi- |
| tion |
| tion |
3 |
|
|
3 |
|
|
Automa- |
|
|
Automa- |
|
|
tic |
| Standard Zustandsübergang |
tic |
| Fehlerzustandsübergang |
| ||
|
| Automatische Zustandswechselkette |
|
|
The actual block state is displayed at the state output.
Fig. 8-2 Inputs and outputs of the mode changeover
IN
Execute
![]() Mode
Mode
StopCutting
KnifeOut
Gap
OnTheSpotCut
FB_BGD_TEMPLATE_FlyingSaw()
OUT
Done
Busy
Error
Cut
OnTheSpotCutPossible
OnTheSpotCutDone
ErrorID
State
Changing-over the mode
In order to transition the block into a new state, the number of the required target state must be specified at the mode input. The changeover is activated using a high signal at Execute input. The block signals the active changeover into the new state using a high signal at the Busy output. If all of the actions associated with the changeover have been successfully
V 1.4 | Release 06/06/08 | 82/107 |