All rights reserved | Saw V1.4.doc |
Copyright ♥ Siemens AG 2008 | Manual SIMOTION Flying |
Section C: Integrating the core “flying saw” functions
Program environment and interfaces
Flying Saw with SIMOTION |
|
|
| ||
|
|
|
|
|
|
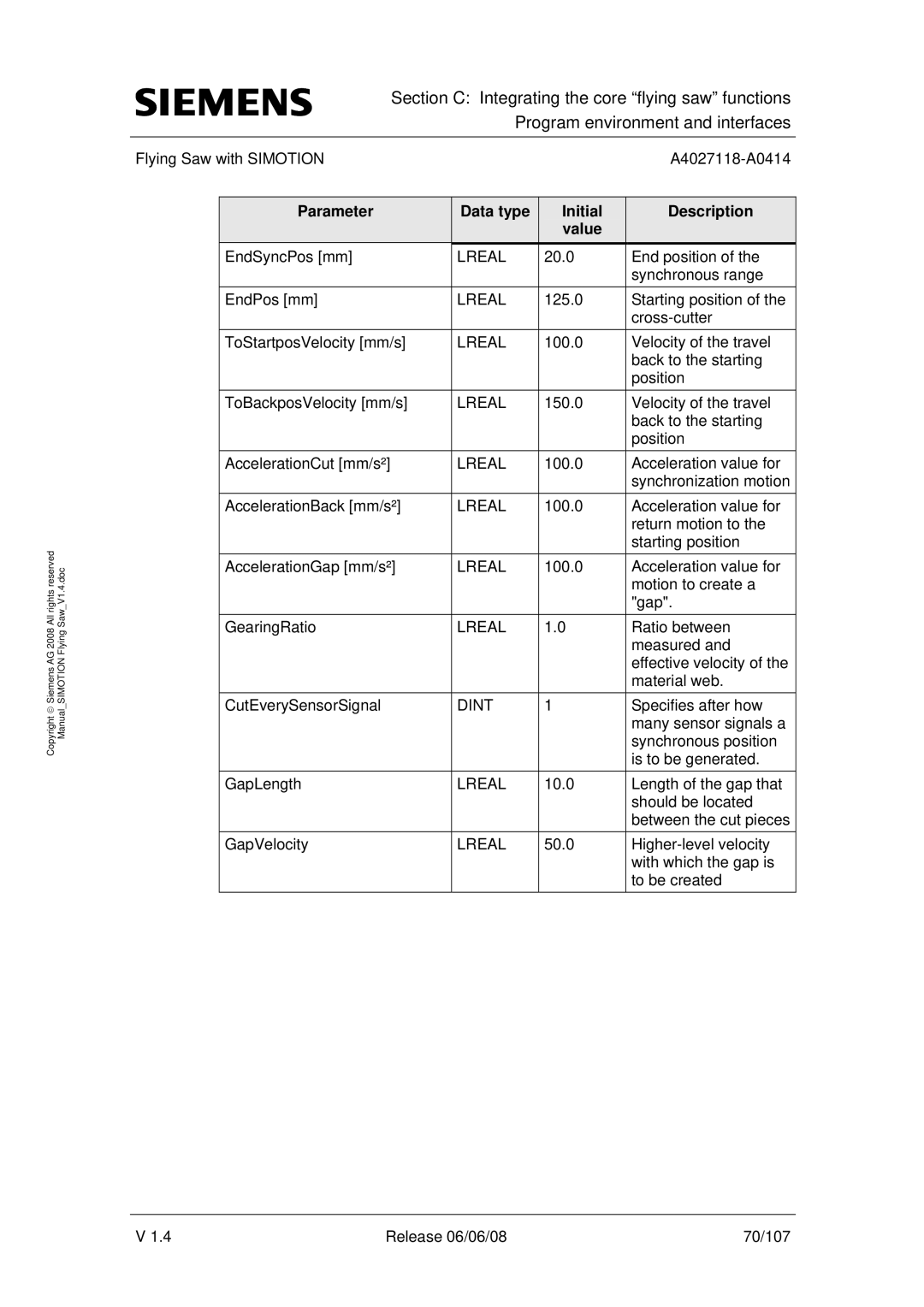
| Parameter | Data type | Initial |
| Description |
|
|
| value |
|
|
| EndSyncPos [mm] | LREAL | 20.0 |
| End position of the |
|
|
|
|
| synchronous range |
| EndPos [mm] | LREAL | 125.0 |
| Starting position of the |
|
|
|
|
| |
| ToStartposVelocity [mm/s] | LREAL | 100.0 |
| Velocity of the travel |
|
|
|
|
| back to the starting |
|
|
|
|
| position |
| ToBackposVelocity [mm/s] | LREAL | 150.0 |
| Velocity of the travel |
|
|
|
|
| back to the starting |
|
|
|
|
| position |
| AccelerationCut [mm/s²] | LREAL | 100.0 |
| Acceleration value for |
|
|
|
|
| synchronization motion |
| AccelerationBack [mm/s²] | LREAL | 100.0 |
| Acceleration value for |
|
|
|
|
| return motion to the |
|
|
|
|
| starting position |
| AccelerationGap [mm/s²] | LREAL | 100.0 |
| Acceleration value for |
|
|
|
|
| motion to create a |
|
|
|
|
| "gap". |
| GearingRatio | LREAL | 1.0 |
| Ratio between |
|
|
|
|
| measured and |
|
|
|
|
| effective velocity of the |
|
|
|
|
| material web. |
| CutEverySensorSignal | DINT | 1 |
| Specifies after how |
|
|
|
|
| many sensor signals a |
|
|
|
|
| synchronous position |
|
|
|
|
| is to be generated. |
| GapLength | LREAL | 10.0 |
| Length of the gap that |
|
|
|
|
| should be located |
|
|
|
|
| between the cut pieces |
| GapVelocity | LREAL | 50.0 |
| |
|
|
|
|
| with which the gap is |
|
|
|
|
| to be created |
V 1.4 | Release 06/06/08 | 70/107 |