Robotics Interface Module
■A
■A
■A
■A proximity sensor for detection of empty slots and unlabeled cartridges
■A
Important:
Because of the four individual rails, each robotic assembly is considered a library storage module (LSM). So the architecture of the SL8500 provides four separate and unique LSMs within a single library.
To optimize system performance, the HandBots automatically implement the Fast Load capability. Once a HandBot successfully inserts a cartridge into a drive, it is immediately available for the next request and does not wait until the drive reports that the cartridge has been loaded. The SL8500 library control electronics waits to return the response to the mount request until it detects that the tape drive has successfully loaded the cartridge tape.
Two HandBots can service a single rail section within the library, providing redundancy. Each HandBot has two motors, if one fails, the other motor is powerful enough to move the defective HandBot into the forward service area. If both the motors fail for a HandBot, then the redundant HandBot moves the defective HandBot into the forward service area thus continuing HandBot operations.
One robotics interface module contains up to 800 cartridge storage slots.
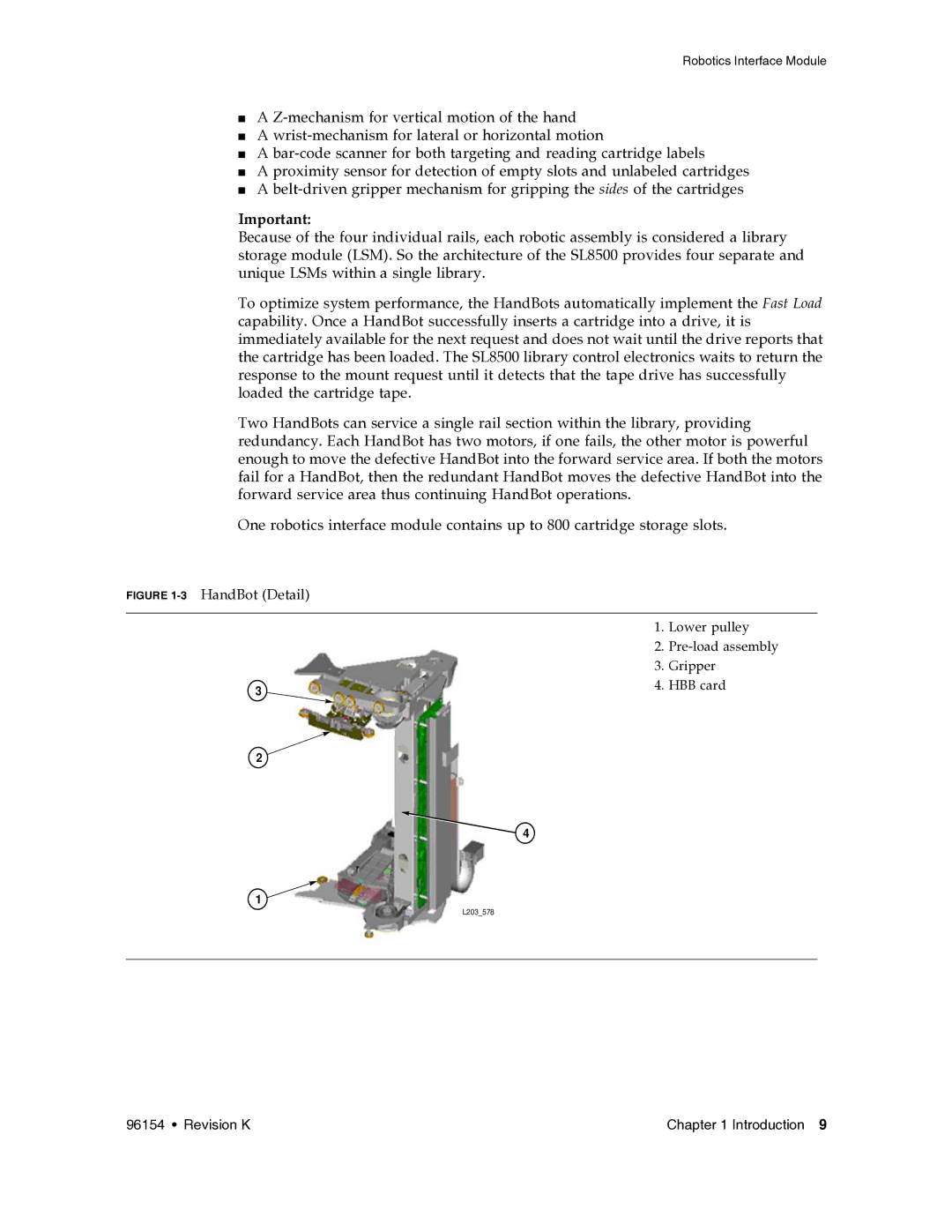
FIGURE 1-3 HandBot (Detail)
| 1. | Lower pulley |
| 2. | |
| 3. | Gripper |
3 | 4. | HBB card |
|
| |
2 |
|
|
4
1
L203_578
96154 • Revision K | Chapter 1 Introduction 9 |