102
Biases and gains of speed setting terminals
Thank you for choosing this Mitsubishi Vector Inverter
101
Electric Shock Prevention
Operation
Transportation and installation
Wiring
Trial run
General instructions
Maintenance, inspection and parts replacement
Emergency stop
Disposing of the inverter
Front view
Abbreviations
Harmonic Suppression Guideline
Product check and name of parts
Basic configuration and connection of peripheral devices
Basic configuration and connection of peripheral devices
Basic configuration
400V class
Select the NFB type according to the power supply capacity
Selection of peripheral devices
200V class
Structure
Removal and reinstallation of the front cover
Reinstallation
Structure
Structure Removal and reinstallation of the operation panel
Reinstallation using the connection cable
Reinstallation
Installation of the inverter
Installation of the inverter
Install the inverter under the following conditions
Connection diagram, PLG cable, PU connector
Connection diagram, PLG cable, PU connector
Connection diagram
Connection diagram, PLG cable, PU connector Main circuit
Specification of main circuit terminal
Terminal Symbol Terminal Name Description
Screw size M8
Terminal arrangement of the main circuit terminal
Screw size M6
400V class
Cable gause for the control circuit power
Cables and wiring length
200V class When input power supply is
400V class When input power supply is
Setting the PLG
PLG output circuit jumper connector
Type Length L m
Pr Setting Relationship between the motor and PLG
Parameter Name Factory Setting Setting Range Remarks
Connection diagram, PLG cable, PU connector Control circuit
Specifications of control circuit terminals
Type Terminal Terminal Name Description Symbol
Wiring instructions
Not output during inverter reset
Control circuit terminal layout
Changing the control logic
When using an external power supply for transistor output
For computer link communication
Dedicated motor SF-V5R 1500r/min series
Setting the m otor
Setting the motor
Parameter Name Factory Setting Setting Range
When using other manufacturers’ motors
At-a-glance guide to motor setting
Precautions for use of the vector inverter
Precautions for use of the vector inverter
Motor Rated Voltage
Checks prior to test run
Basic operation Speed setting, run, speed meter adjustment
Setting the speed and running the motor
Checks prior to test run
Operation status indication FWD or REV flickers
Basic operation Speed setting, run, speed meter adjustment
Turn on the start switch STF or STR
PU jog operation
External jog operation
To stop the inverter
Changing example
Display the present operation speed by pressing SET to
It may take some time until the pointer moves
Unit indication, operation status indication
Names and functions of the operation panel
Names and functions of the opera- tion panel
Key indication
Monitoring
Speed setting
Used to set the running speed in the PU operation mode
Alarm *1 absent
Once, press SET , and restart the setting from the beginning
Operation mode
Names and functions of the opera- tion panel Help mode
Alarm history
Alarm history clear Clears all alarm history
All clear
Parameter clear
Parameter setting mode
Names and functions of the opera- tion panel Copy mode
Speed control
Setting procedure
Speed control operation
Speed control operation
Torque restriction
Speed control operation Operation command setting
Forward and reverse rotation commands terminals STF, STR
Speed command
Second torque restriction level
Torque restriction level
Pr deceleration torque
Gain adjustment
Preset speed-speed
Torque restrictions during acceleration and deceleration
Torque control
When 0 is set in Pr or Pr acceleration/deceleration time
Torque control operation
Torque control operation
Operation example Pr =0
O signals
Following table indicates the operations of the signals
Signal Terminal Name Remarks
Perform secure wiring. Refer to Set the PLG. Refer to
Torque control operation Setting procedure
Torque command right selection
Torque command setting
Speed restriction
When Pr =
Used to give a speed restriction command
10E +10V
Position control operation
Position command from parameter setting
Position command from PLC
Position control operation
Assumes that the Pr value is the factory setting
Control mode switchover timing
Control mode switchover timing
〈 Example Speed Position, when Pr = 4〉
Start signal
Easy gain tuning
Easy gain tuning
Easy gain tuning execution procedure
Load inertia estimation restriction conditions
Easy gain tuning Precautions for easy gain tuning
Automatically set parameters by easy gain tuning
Checking the Pr control system selection value
Page
3 Pr = 2 normal tuning/adaptive magnetic flux observer
Online auto tuning
Online auto tuning
2 Pr =1 start-time tuning
10V
Setting
Output speed
Torque %
Read Pr to display the currently set gain speed
Setting change 1.5 s
Current analog voltage adjustment value
Example When the analog
Value is 100%
Function list Simple mode parameters
Function list Simple mode parameters
Simple mode parameter list
Pr maximum speed, Pr minimum speed
Setting Carrier Frequency
You can change the motor sound
Refer to page 62 for Pr soft PW M control
Refer to page 46 for details
Pr control system selection
Setting Drive System Control Method Remarks
Refer to page 43 for details
Pr extended function display selection
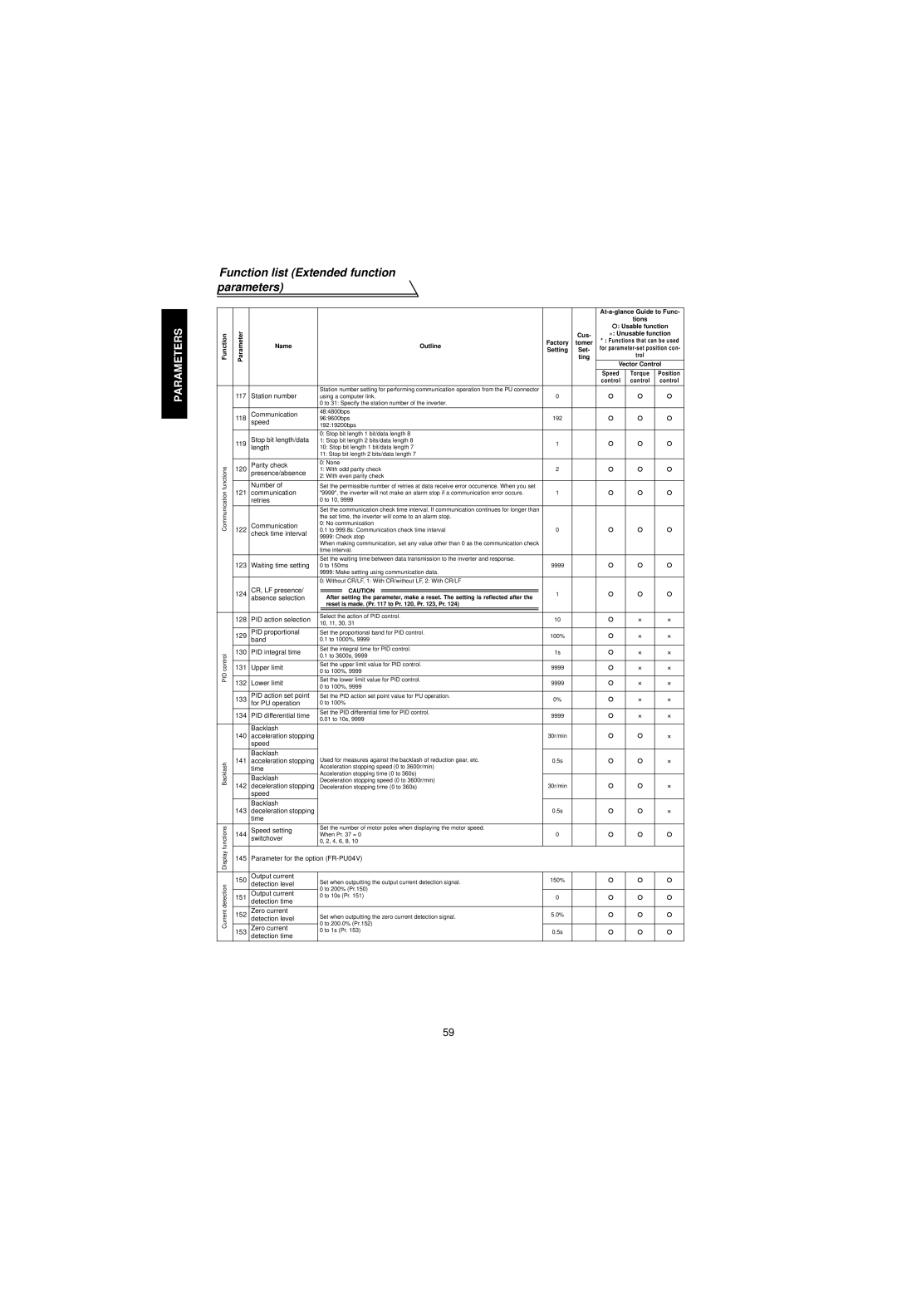
Function list Extended function parameters
Function list Extended function parameters
Speed jump 1B
Deceleration pattern
Regenerative
Speed jump 1A
DA1 terminal function
Remote setting
Intelligent mode
Alarm occurrence
Speed setting signal
Applied motor
PWM frequency Selection
Online auto tuning Selection Auto tuning setting
Reset selection
Parameter write Disable selection Reverse rotation
Operation mode
117 Station number
123 Waiting time setting
144 Speed setting
Switchover
Stall prevention 156 Operation selection
157 OL signal output
Timer
Power failure
Meter clear DI1 terminal function
Maker setting parameters. Do not make setting 169
168
171 Actual operation hour
236 Multi-speed setting
232 Multi-speed setting
Multi-speed setting 233
234 Multi-speed setting
286 Droop gain
Command selection
Switchover speed
Command 357 In-position zone
427 Excessive level error
Position command
Command pulse 420 Scaling factor Numerator
Command filter
Amount lower 4 digits
Digital position
464 Control sudden stop
465 First position feed
Value RAM Torque command
Selection 801 Torque characteristic
Characteristic
805 Torque command
832 Speed setting filter
818 Easy gain tuning Response level setting 819
822 Speed setting filter
826 Torque setting filter
842 Torque bias
Adjustment
840 Torque bias selection
841 Torque bias
Setting time 892 Maintenance output
874 OLT level setting
Fault definition
890 Maintenance output
Errors Alarms
Errors Alarms
Major faults
Inv. Overload
OV During Acc
OV During Dec
Motor Overload
Under Voltage
Br. Cct. Fault
Ground Fault
Inst. Pwr. Loss
Stll Prev STP OL shown during stall
OH Fault
Option Fault
Option slot alarm 1 to
PU Leave Out
Fault 1 to Fault
CPU Fault
Corrupt Memry
Operation Panel P12
Fault
Indication Fault Name
Operation Panel P24
Overspeed occurrence
No encoder signal
Excessive position error
No encoder a signal
Minor fault
Fan Failure
Stall prevention
Operation Panel Err Indication
Reset from operation panel
Errors Alarms How to recover from PU stop error PS
Resetting the inverter
Correspondences between digital and actual characters
Correspondences between digital and actual characters
Memo
Vector control
Troubleshooting
Troubleshooting
Motor generates abnormal noise
Vector control
Troubleshooting Motor does not rotate
Parameter
Command been
Is the torque
For speed restriction?
F control
Troubleshooting Motor generates heat abnormally
Troubleshooting Motor hunts
Speed control
Being made?
Troubleshooting Machine operates unstably
Troubleshooting Speed command does not match motor speed
Have you set the motor type? Is the PLG setting correct?
Does the inverters speed command match the motor speed?
Troubleshooting Motor rotates but speed does not change
Pr , Pr Is an external
Troubleshooting Torque control is not exercised normally
Is the wiring length short?
Torque control
Filter Pr
Is the torque command unvaried?
Reduce noise
Frequency low?
Check items
Precautions for maintenance and inspection
Precautions for maintenance and inspection
Insulation resistance test using megger
Precautions for maintenance and inspection Pressure test
Daily and periodic inspection
Do not conduct a pressure test. Deterioration may occur
Area Inspection Description
Replacement of parts
Part Name Standard Replacement Interval Description
Interval
Cooling fan
Smoothing capacitors
Relays
Examples of Measuring Points and Instruments
Measurement of main circuit voltages, currents and powers
Pf2 =
Measuring Points and Instruments
100% Pf1 =
100%
Model specifications
Model specifications
10.0 14.5 18.5 27.5 35.5 51.8 132
Three-phase, 380 to 480V 50Hz/60Hz
Three-phase, 380V to 480V 50Hz/60Hz
10.0 12.8 19.0 24.6 30.4 35.8 46.3 59.5 68.5 91.0
Common specifications
Common specifications
FR-V520-1.5K‚ 2.2K FR-V540-1.5K‚ 2.2K
Outline dimension drawings
Outline dimension drawings
Inverter outline dimension drawings
FR-V520-11K‚ 15K FR-V540-7.5K‚ 11K, 15K, 18.5K
FR-V520-18.5K
250
Inverter Type
FR-V520-22K, 30K‚ 37K !FR-V540-22K, 30K‚ 37K
SF-V5RH 2K ‚ 3K
SF-V5RH 1K
SF-V5RH 5K ‚ 7K
110
SF-V5RH 30K ‚ 37K ‚ 45K ‚ 55K
Print Date Manual Number Revision
For Maximum Safety