PARAMETERS
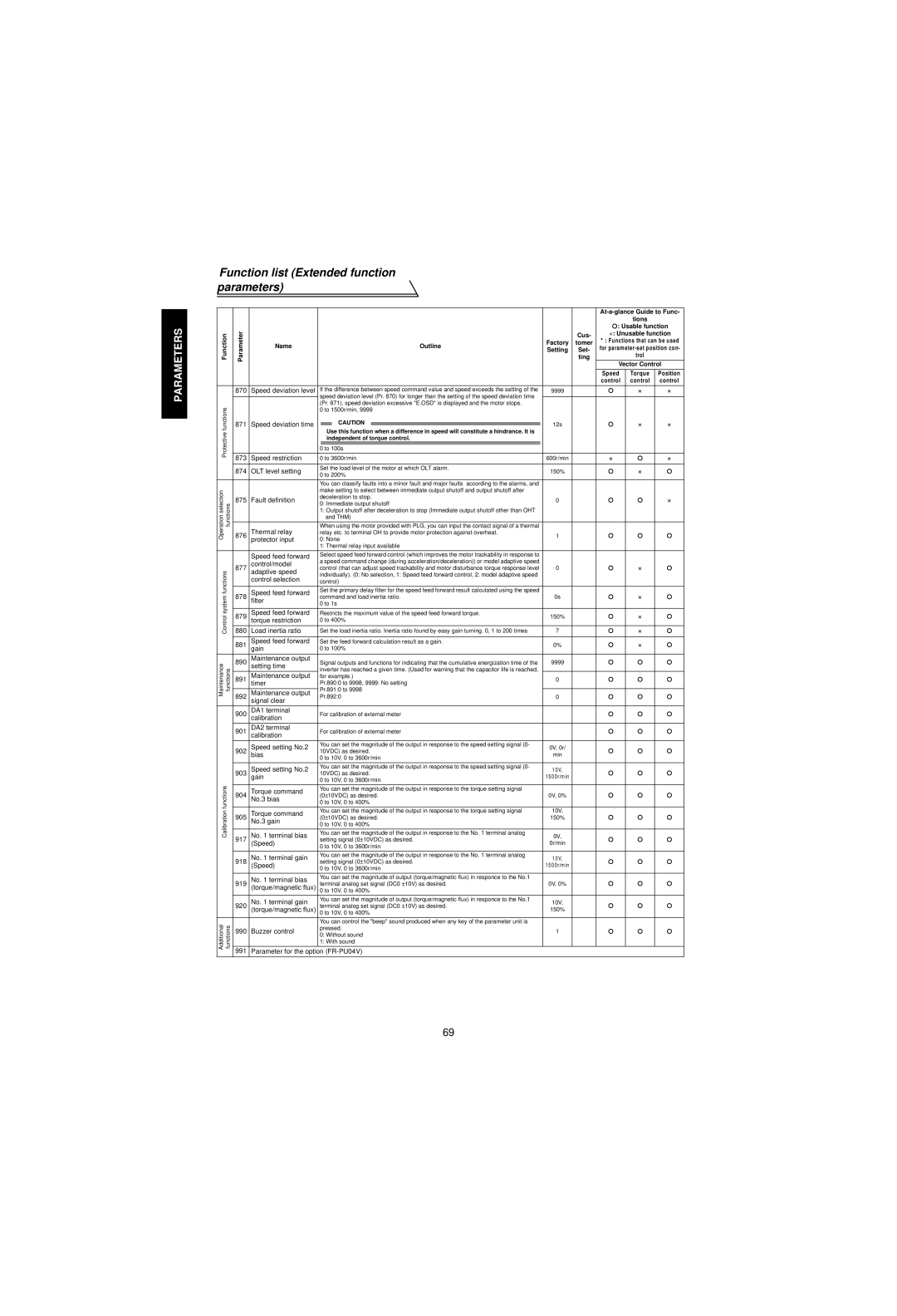
Function list (Extended function parameters)
|
|
|
|
|
|
|
|
|
| |||
|
|
|
|
|
|
|
|
|
|
| tions |
|
|
|
|
|
|
|
|
|
|
| ": Usable function | ||
Function | Parameter |
|
|
|
|
|
|
| Cus- | ×: Unusable function | ||
|
|
|
|
|
|
|
|
| * : Functions that can be used | |||
|
| Name |
|
|
| Outline | Factory | tomer | ||||
|
|
|
|
| for param | |||||||
|
|
|
|
| Setting | Set- | ||||||
|
|
|
|
|
|
|
|
| trol |
| ||
|
|
|
|
|
|
|
|
| ting |
|
| |
|
|
|
|
|
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
|
| Vector Control | ||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| Speed | Torque | Position |
|
|
|
|
|
|
|
|
|
| control | control | control |
|
|
|
|
|
|
|
|
|
|
|
|
|
| 870 | Speed deviation level | If the difference between speed command value and speed exceeds the setting of the | 9999 |
| " | × | × | ||||
|
|
| speed deviation level (Pr. 870) for longer than the setting of the speed deviation time |
|
|
|
|
| ||||
|
|
|
|
|
|
|
| |||||
|
|
| (Pr. 871), speed deviation excessive "E.OSD" is displayed and the motor stops. |
|
|
|
|
| ||||
functions |
|
| 0 to 1500r/min, 9999 |
|
|
|
|
| ||||
871 | Speed deviation time |
|
| CAUTION |
|
| 12s |
| " | × | × | |
|
|
|
|
|
| |||||||
|
|
|
|
| ||||||||
Protective |
|
|
| Use this function when a difference in speed will constitute a hindrance. It is |
|
|
|
|
| |||
|
|
| independent of torque control. |
|
|
|
|
|
| |||
|
|
|
|
|
|
|
|
|
|
| ||
|
|
| 0 to 100s |
|
|
|
|
| ||||
|
|
|
|
|
|
|
|
|
|
|
|
|
| 873 | Speed restriction | 0 to 3600r/min | 600r/min |
| × | " | × | ||||
|
|
|
|
|
|
|
|
|
|
|
|
|
| 874 | OLT level setting | Set the load level of the motor at which OLT alarm. | 150% |
| " | × | " | ||||
| 0 to 200% |
| ||||||||||
|
|
|
|
|
|
|
| |||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| You can classify faults into a minor fault and major faults according to the alarms, and |
|
|
|
|
| ||||
Operationselection functions | 876 | Thermal relay | make setting to select between immediate output shutoff and output shutoff after | 1 |
| " | " | " | ||||
relay etc. to terminal OH to provide motor protection against overheat. |
| |||||||||||
| 875 | Fault definition | deceleration to stop. | 0 |
| " | " | × | ||||
|
|
| 0: Immediate output shutoff |
|
|
|
|
| ||||
|
|
| 1: Output shutoff after deceleration to stop (Immediate output shutoff other than OHT |
|
|
|
|
| ||||
|
|
|
| and THM) |
|
|
|
|
| |||
|
|
| When using the motor provided with PLG, you can input the contact signal of a thermal |
|
|
|
|
| ||||
|
| protector input | 0: None |
|
|
|
|
| ||||
|
|
| 1: Thermal relay input available |
|
|
|
|
| ||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| Speed feed forward | Select speed feed forward control (which improves the motor trackability in response to |
|
|
|
|
| ||||
| 877 | control/model | a speed command change (during acceleration/deceleration)) or model adaptive speed |
|
| " | × | " | ||||
| control (that can adjust speed trackability and motor disturbance torque response level | 0 |
| |||||||||
functions |
| adaptive speed | Set the primary delay filter for the speed feed forward result calculated using the speed |
|
|
|
|
| ||||
|
| control selection | individually). (0: No selection, 1: Speed feed forward control, 2: model adaptive speed |
|
|
|
|
| ||||
|
| control) |
|
|
|
|
| |||||
|
|
|
|
|
|
|
| |||||
|
|
|
|
|
|
|
|
|
|
|
|
|
system | 878 | Speed feed forward | command and load inertia ratio. | 0s |
| " | × | " | ||||
| filter | 0 to 1s |
|
|
|
|
| |||||
|
|
|
|
|
|
| ||||||
|
|
|
|
|
|
|
| |||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Control | 879 | Speed feed forward | Restricts the maximum value of the speed feed forward torque. | 150% |
| " | × | " | ||||
880 | Load inertia ratio | Set the load inertia ratio. Inertia ratio found by easy gain turning. 0, 1 to 200 times | 7 |
| " | × | " | |||||
|
| torque restriction | 0 to 400% |
|
|
|
|
| ||||
|
|
|
|
|
|
|
|
|
|
|
|
|
| 881 | Speed feed forward | Set the feed forward calculation result as a gain. | 0% |
| " | × | " | ||||
|
| gain | 0 to 100% |
|
|
|
|
| ||||
| 890 | Maintenance output | Signal outputs and functions for indicating that the cumulative energization time of the | 9999 |
| " | " | " | ||||
Maintenance functions | setting time |
| ||||||||||
892 | Maintenance output | Pr.892:0 | 0 |
| " | " | " | |||||
|
|
| inverter has reached a given time. (Used for warning that the capacitor life is reached, |
|
|
|
|
| ||||
| 891 | Maintenance output | for example.) | 0 |
| " | " | " | ||||
|
| timer | Pr.890:0 to 9998, 9999: No setting |
|
|
|
|
| ||||
|
|
| Pr.891:0 to 9998 |
|
|
|
|
| ||||
|
| signal clear |
|
|
|
|
| |||||
|
|
|
|
|
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
|
|
|
|
|
| 900 | DA1 terminal | For calibration of external meter |
|
| " | " | " | ||||
|
| calibration |
|
|
|
|
|
|
|
|
|
|
| 901 | DA2 terminal | For calibration of external meter |
|
| " | " | " | ||||
|
| calibration |
|
|
|
|
|
|
|
|
|
|
| 902 | Speed setting No.2 | You can set the magnitude of the output in response to the speed setting signal (0- | 0V, 0r/ |
| " | " | " | ||||
| 10VDC) as desired. |
| ||||||||||
|
| bias | 0 to 10V, 0 to 3600r/min | min |
|
|
|
| ||||
|
|
|
|
|
|
|
| |||||
|
|
|
|
|
|
|
|
|
|
|
|
|
| 903 | Speed setting No.2 | You can set the magnitude of the output in response to the speed setting signal (0- | 10V, |
| " | " | " | ||||
| 10VDC) as desired. |
| ||||||||||
|
| gain | 0 to 10V, 0 to 3600r/min | 1500r/m in |
|
|
|
| ||||
|
|
|
|
|
|
|
| |||||
|
|
|
|
|
|
|
|
|
|
|
|
|
functions | 904 | Torque command | You can set the magnitude of the output in response to the torque setting signal |
|
| " | " | " | ||||
|
|
| ||||||||||
| (0±10VDC) as desired. | 0V, 0% |
| |||||||||
|
| No.3 bias | 0 to 10V, 0 to 400% |
|
|
|
|
| ||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Calibration | 917 | No. 1 terminal bias | You can set the magnitude of the output in response to the torque setting signal | 10V, |
| " | " | " | ||||
setting signal (0±10VDC) as desired. | 0V, |
| ||||||||||
| 905 | Torque command | (0±10VDC) as desired. | 150% |
| " | " | " | ||||
| No.3 gain |
| ||||||||||
|
|
| 0 to 10V, 0 to 400% |
|
|
|
|
| ||||
|
|
| You can set the magnitude of the output in response to the No. 1 terminal analog |
|
|
|
|
| ||||
|
| (Speed) | 0 to 10V, 0 to 3600r/min | 0r/min |
|
|
|
| ||||
|
|
|
|
|
|
|
| |||||
|
|
|
|
|
|
|
|
|
|
|
|
|
| 918 | No. 1 terminal gain | You can set the magnitude of the output in response to the No. 1 terminal analog | 10V, |
| " | " | " | ||||
| setting signal (0±10VDC) as desired. |
| ||||||||||
|
| (Speed) | 0 to 10V, 0 to 3600r/min | 1500r/m in |
|
|
|
| ||||
|
|
|
|
|
|
|
|
|
|
|
|
|
| 919 | No. 1 terminal bias | You can set the magnitude of output (torque/magnetic flux) in responce to the No.1 |
|
| " | " | " | ||||
| terminal analog set signal (DC0 ±10V) as desired. | 0V, 0% |
| |||||||||
|
| (torque/magnetic flux) | 0 to 10V, 0 to 400% |
|
|
|
|
| ||||
|
|
|
|
|
|
|
|
|
|
|
|
|
| 920 | No. 1 terminal gain | You can set the magnitude of output (torque/magnetic flux) in responce to the No.1 | 10V, |
| " | " | " | ||||
| terminal analog set signal (DC0 ±10V) as desired. |
| ||||||||||
|
| (torque/magnetic flux) | 0 to 10V, 0 to 400% | 150% |
|
|
|
| ||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Additional functions |
|
| You can control the "beep" sound produced when any key of the parameter unit is |
|
|
|
|
| ||||
990 | Buzzer control | pressed. | 1 |
| " | " | " | |||||
|
| |||||||||||
| 0: Without sound |
| ||||||||||
|
|
|
|
|
|
|
| |||||
|
|
| 1: With sound |
|
|
|
|
| ||||
|
|
|
|
|
|
|
|
|
|
|
|
|
| 991 | Parameter for the option |
|
|
|
|
| |||||
|
|
|
|
|
|
|
|
|
|
|
|
|
69