3.5.3.2. Window Used
Displays the size of the window used for the previous measurement. Window used is the closest usable window size, depending on the device measurement resolution.
For example, if window = 1 m, the window used might be 0.96 m. 3.5.3.3. Shots
The number of echo profile samples averaged to produce a measurement..
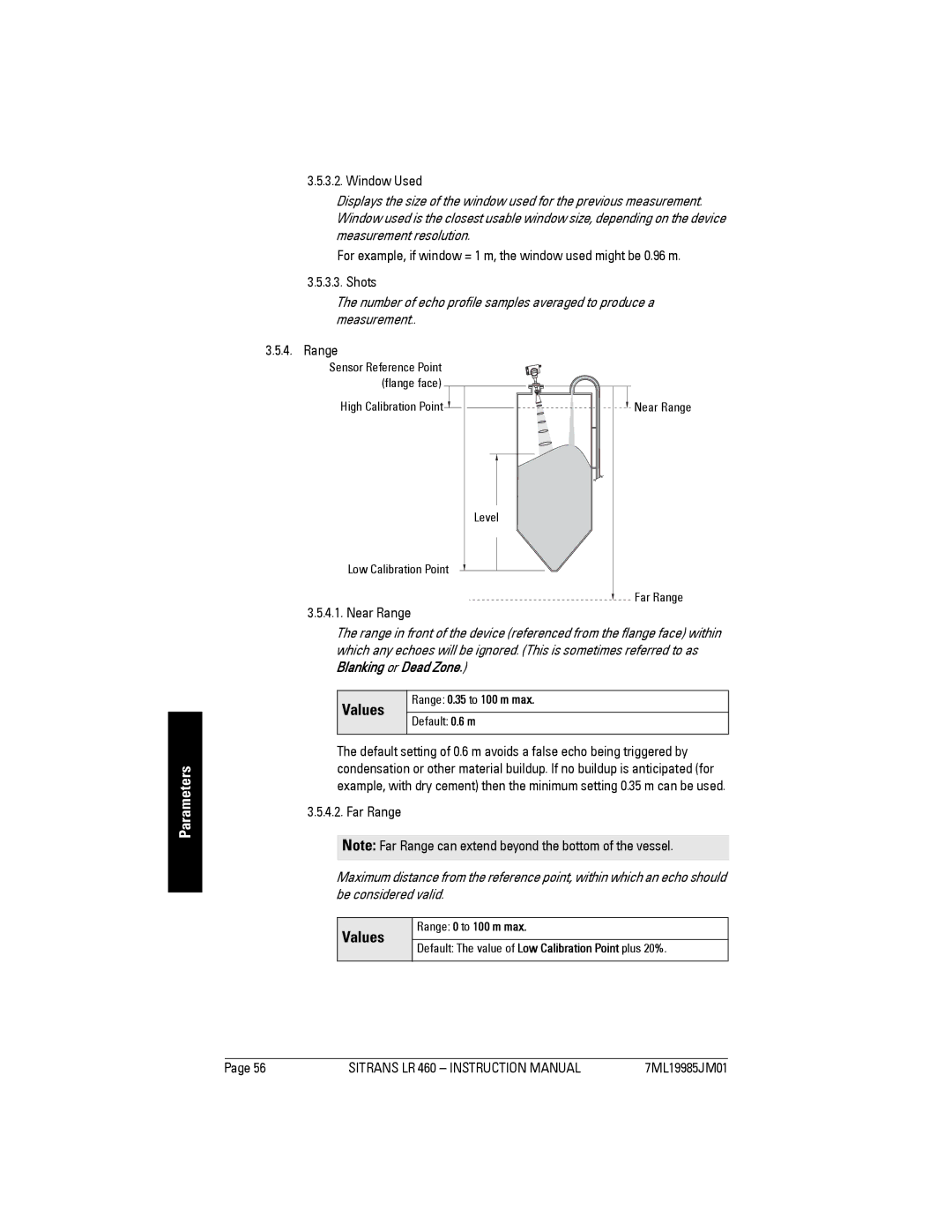
3.5.4. Range
Sensor Reference Point |
|
(flange face) |
|
High Calibration Point | Near Range |
| Level |
Low Calibration Point |
|
| Far Range |
3.5.4.1. Near Range
The range in front of the device (referenced from the flange face) within which any echoes will be ignored. (This is sometimes referred to as Blanking or Dead Zone.)
Values
Range: 0.35 to 100 m max.
Default: 0.6 m
Parameters
The default setting of 0.6 m avoids a false echo being triggered by condensation or other material buildup. If no buildup is anticipated (for example, with dry cement) then the minimum setting 0.35 m can be used.
3.5.4.2. Far Range
Note: Far Range can extend beyond the bottom of the vessel.
Maximum distance from the reference point, within which an echo should be considered valid.
Values
Range: 0 to 100 m max.
Default: The value of Low Calibration Point plus 20%.
Page 56 | SITRANS LR 460 – INSTRUCTION MANUAL | 7ML19985JM01 |