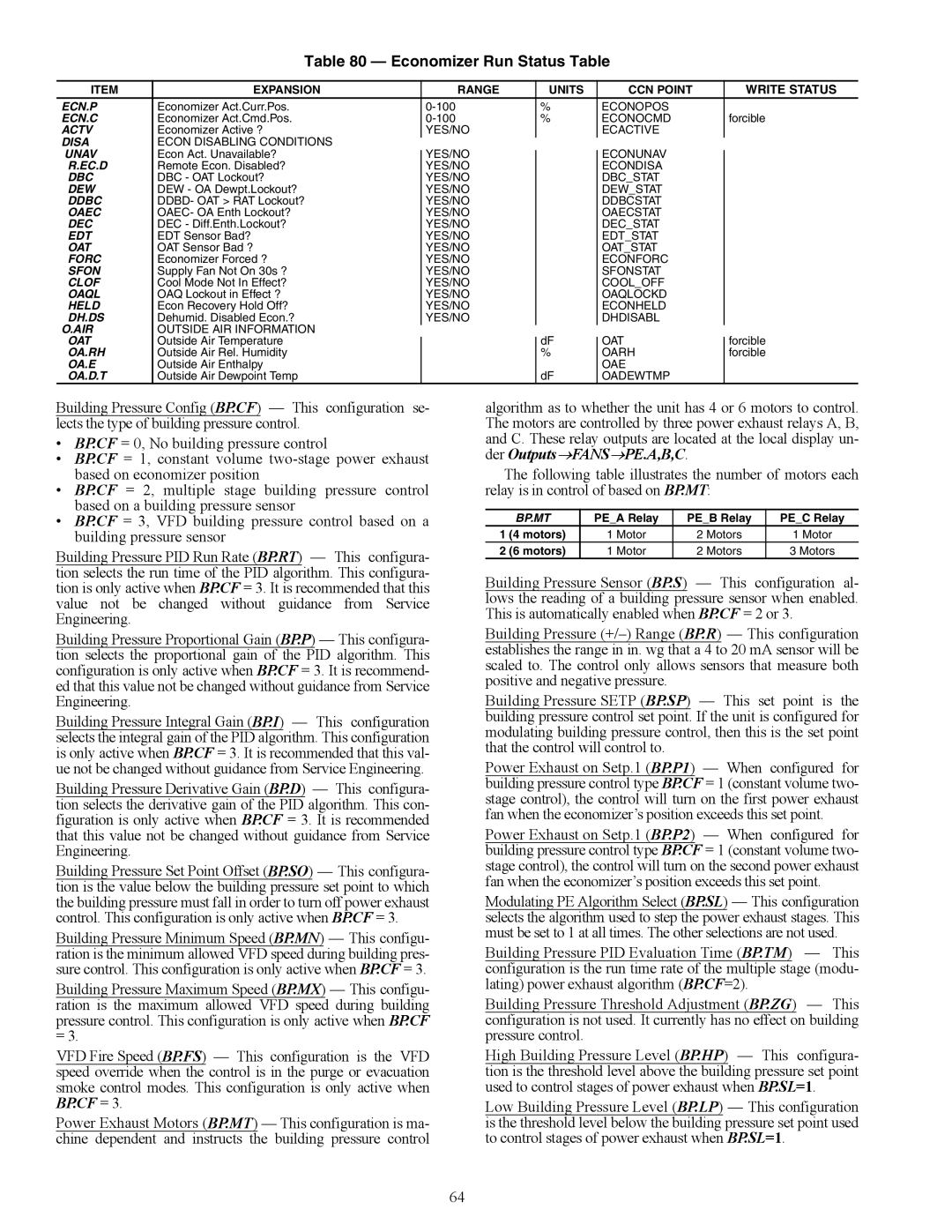
Table 80 — Economizer Run Status Table
ITEM | EXPANSION |
| RANGE |
| UNITS |
| CCN POINT |
| WRITE STATUS |
ECN.P | Economizer Act.Curr.Pos. |
|
| % |
| ECONOPOS |
|
| |
ECN.C | Economizer Act.Cmd.Pos. |
|
| % |
| ECONOCMD |
| forcible | |
ACTV | Economizer Active ? |
| YES/NO |
|
|
| ECACTIVE |
|
|
DISA | ECON DISABLING CONDITIONS |
|
|
|
|
|
|
|
|
UNAV | Econ Act. Unavailable? |
| YES/NO |
|
|
| ECONUNAV |
|
|
|
|
|
|
|
| ||||
R.EC.D | Remote Econ. Disabled? |
| YES/NO |
|
|
| ECONDISA |
|
|
DBC | DBC - OAT Lockout? |
| YES/NO |
|
|
| DBC_STAT |
|
|
DEW | DEW - OA Dewpt.Lockout? |
| YES/NO |
|
|
| DEW_STAT |
|
|
DDBC | DDBD- OAT > RAT Lockout? |
| YES/NO |
|
|
| DDBCSTAT |
|
|
OAEC | OAEC- OA Enth Lockout? |
| YES/NO |
|
|
| OAECSTAT |
|
|
DEC | DEC - Diff.Enth.Lockout? |
| YES/NO |
|
|
| DEC_STAT |
|
|
EDT | EDT Sensor Bad? |
| YES/NO |
|
|
| EDT_STAT |
|
|
OAT | OAT Sensor Bad ? |
| YES/NO |
|
|
| OAT_STAT |
|
|
FORC | Economizer Forced ? |
| YES/NO |
|
|
| ECONFORC |
|
|
SFON | Supply Fan Not On 30s ? |
| YES/NO |
|
|
| SFONSTAT |
|
|
CLOF | Cool Mode Not In Effect? |
| YES/NO |
|
|
| COOL_OFF |
|
|
OAQL | OAQ Lockout in Effect ? |
| YES/NO |
|
|
| OAQLOCKD |
|
|
HELD | Econ Recovery Hold Off? |
| YES/NO |
|
|
| ECONHELD |
|
|
DH.DS | Dehumid. Disabled Econ.? |
| YES/NO |
|
|
| DHDISABL |
|
|
O.AIR | OUTSIDE AIR INFORMATION |
|
|
|
|
|
|
|
|
OAT | Outside Air Temperature |
|
|
| dF |
| OAT |
| forcible |
|
|
|
|
| |||||
OA.RH | Outside Air Rel. Humidity |
|
|
| % |
| OARH |
| forcible |
OA.E | Outside Air Enthalpy |
|
|
|
|
| OAE |
|
|
OA.D.T | Outside Air Dewpoint Temp |
|
|
| dF |
| OADEWTMP |
|
|
Building Pressure Config (BP.CF) — This configuration se- lects the type of building pressure control.
•BP.CF = 0, No building pressure control
•BP.CF = 1, constant volume
•BP.CF = 2, multiple stage building pressure control based on a building pressure sensor
•BP.CF = 3, VFD building pressure control based on a building pressure sensor
Building Pressure PID Run Rate (BP.RT) — This configura- tion selects the run time of the PID algorithm. This configura- tion is only active when BP.CF = 3. It is recommended that this value not be changed without guidance from Service Engineering.
Building Pressure Proportional Gain (BP.P) — This configura- tion selects the proportional gain of the PID algorithm. This configuration is only active when BP.CF = 3. It is recommend- ed that this value not be changed without guidance from Service Engineering.
Building Pressure Integral Gain (BP.I) — This configuration selects the integral gain of the PID algorithm. This configuration is only active when BP.CF = 3. It is recommended that this val- ue not be changed without guidance from Service Engineering.
Building Pressure Derivative Gain (BP.D) — This configura- tion selects the derivative gain of the PID algorithm. This con- figuration is only active when BP.CF = 3. It is recommended that this value not be changed without guidance from Service Engineering.
Building Pressure Set Point Offset (BP.SO) — This configura- tion is the value below the building pressure set point to which the building pressure must fall in order to turn off power exhaust control. This configuration is only active when BP.CF = 3.
Building Pressure Minimum Speed (BP.MN) — This configu- ration is the minimum allowed VFD speed during building pres- sure control. This configuration is only active when BP.CF = 3.
Building Pressure Maximum Speed (BP.MX) — This configu- ration is the maximum allowed VFD speed during building pressure control. This configuration is only active when BP.CF = 3.
VFD Fire Speed (BP.FS) — This configuration is the VFD speed override when the control is in the purge or evacuation smoke control modes. This configuration is only active when BP.CF = 3.
Power Exhaust Motors (BP.MT) — This configuration is ma- chine dependent and instructs the building pressure control
algorithm as to whether the unit has 4 or 6 motors to control. The motors are controlled by three power exhaust relays A, B, and C. These relay outputs are located at the local display un- der Outputs→FANS→PE.A,B,C.
The following table illustrates the number of motors each relay is in control of based on BP.MT:
BP.MT | PE_A Relay | PE_B Relay | PE_C Relay |
1 (4 motors) | 1 Motor | 2 Motors | 1 Motor |
2 (6 motors) | 1 Motor | 2 Motors | 3 Motors |
Building Pressure Sensor (BP.S) — This configuration al- lows the reading of a building pressure sensor when enabled. This is automatically enabled when BP.CF = 2 or 3.
Building Pressure
Building Pressure SETP (BP.SP) — This set point is the building pressure control set point. If the unit is configured for modulating building pressure control, then this is the set point that the control will control to.
Power Exhaust on Setp.1 (BP.P1) — When configured for building pressure control type BP.CF = 1 (constant volume two- stage control), the control will turn on the first power exhaust fan when the economizer’s position exceeds this set point.
Power Exhaust on Setp.1 (BP.P2) — When configured for building pressure control type BP.CF = 1 (constant volume two- stage control), the control will turn on the second power exhaust fan when the economizer’s position exceeds this set point.
Modulating PE Algorithm Select (BP.SL) — This configuration selects the algorithm used to step the power exhaust stages. This must be set to 1 at all times. The other selections are not used.
Building Pressure PID Evaluation Time (BP.TM) — This configuration is the run time rate of the multiple stage (modu- lating) power exhaust algorithm (BP.CF=2).
Building Pressure Threshold Adjustment (BP.ZG) — This configuration is not used. It currently has no effect on building pressure control.
High Building Pressure Level (BP.HP) — This configura- tion is the threshold level above the building pressure set point used to control stages of power exhaust when BP.SL=1.
Low Building Pressure Level (BP.LP) — This configuration is the threshold level below the building pressure set point used to control stages of power exhaust when BP.SL=1.
64