Page
Clock Generator for 8080A
System Controller for 8080A
Programmable Communication Interface
Programmable Peripheral Interface
Contents
Chapter Packaging Information
127
Peri pherals
Page
Conventional System Programmed Logic
Advantages of Designing With Microcomputers
Microcomputer Design Aids
1IIII~Iff1
Applications Example
Iii
Application
Peripheral Devices Encountered
Accumulator
Typical Computer System
Architecture of a CPU
Program Counter Jumps, Subroutines and the Stack
Instruction Register and Decoder
Control Circuitry
Address Registers
Arithmetic/Logic Unit ALU
Computer Operations
Instruction Fetch
Memory Read
Memory Write
Wait memory synchronization
Page
Page
INTE~
8080 Photomicrograph With Pin Designations
Architecture of the 8080 CPU
Registers
Arithmetic and Logic Unit ALU
Instruction Register and Control
Data Bus Buffer
Processor Cycle
Machine Cycle Identification
State Transition Sequence
Halt
Status Information Definition
Status Word Chart
Status Bit Definitions
CPU State Transition Diagram
?~~
Rr\
ONE ,----- ~
State Associated Activities
~2. State Definitions
RLrL- rL rL rL-rL- rLrL
Interrupt Sequences
¢2 -+--sLJJlL-..rrL~LJLLJTLJJ\.lJL
START-UP of the 8080 CPU
Hold Sequences
Halt Sequences
11. Halt Timing
~~~~t==p
001
STATUS6
Xram
~iA~~~11
~iA~~ll,12
~A~~~ll
~iA~~~11
Value
111 000 001 010 011 100 101
Typical Computer System Block Diagram
Basic System Operation
CPU Module Design
8080 CPU
Clock Generator and High Level Driver
Clock Generator Design
High Level Driver Design
ClK 0.......-..-.-----.. tf1A TTL
~50ns
Ststb !1
Page
RAM Interface
Interfacing the 8080 CPU to Memory and I/O Devices
ROM Interface
Ill
Interface
General Theory
Isolated I/O
Memory Mapped I/O
Memr to
Addressing
Interface Example
13 Format
15 Format
Instruction and Data Formats
8080 Instruction SET
Byte One
Byte Two
Byte Three I D7
Addressing Modes
Symbols and Abbreviations
Symbols Meaning
Description Format
All
Content of register r2 is moved to register r1
Data Transfer Group
MOV r1, r2 Move Register
Reg. indirect
0 I R p
0 I R
0 I
Arithmetic Group
1 I
0 I 0 o
R 0 I
0 I D I D
I I
Logical Group
OCR M Decrement memory
Cycles States Addressing reg. indirect Flags Z,S,P ,CY,AC
I 0 I 1 I 1 I
I 1 I 1 o I 1 I 1 I
~11~
1 1 1
0 I 1 I
0 I 0 1 I
0 I 0 I
Cycles States Flags none
Branch Group
000
SP ~ SP +
I c c I c I 0 I 0 I
Ccondition addr
Stack, I/O, and Machine Control Group
I 1 o
Push rp
1 I R
Exchange stack top with Hand L
~ SP +
~ data
Cycles States Flags None
Instruction SET
Programmable Peripheral Interface
8224 8080A-1 8228 8080A-2 8080A M8080-A
Page
Schottky Bipolar
PIN Names
Functional Description
General
Oscillator
Clock Generator
Power-On Reset and Ready Flip-Flops
Ststb Status Strobe
Characteristics
Crystal Requirements
Input
8pF
Characteristics For tCY = 488.28 ns
Example
T42 T01 T02 T03 Toss
TORS tORH tOR FMAX
PIN Configuration Block Diagram
Dbin
General
Block
Signals
Inta None Control
Characteristics TA = Oc to 70C Vee = 5V ±5%
TE~r
Waveforms
Hlda to Read Status Outputs
GoUT
Ststb
VTH
VCC=5V
·-c
GND ---. r
Intel Silicon Gate MOS 8080 a
?oo .H
8080A Functional PIN Definition
Vee
Vss
Characteristics
Absolute Maximum RATINGS·
Capacitance
IOl = 1.9mA on all outputs
=..... -r-DATAIN
~I~~~
Timing Waveforms
~~1 t CY
Characteristics
Typical ~ Output Delay VS. a Capacitance
Instruction SET
Typical Instructions
Silicon Gate MOS 8080.A
Summary of Processor Instructions
Infel Silicon Gate MOS 8080A-1
Unit
Symbol Parameter Typ
Max
~-t
Fft~l
~tOF.I
TYPICAL!J. Output Delay VS. ~ Capacitance
Infel Silicon Gate MOS 8080 A-2
+10
Cout
J1A
VAOOR/OATA = VSS + O.45V
Symbol Parameter Min
Unit Test Condition
Typical ~ Output Delay VS. ~ Capacitance
Min. Max. Unit Test Condition
Page
Intel . Silicon Gate MOS M8080A
Immediate mode or I/O instructions
Register to regist~r, memory refer
Ence, arithmetic or logical, rotate
Interrupt instructions
Summary of Processor Instructions
Llf17
Silicon Gate MOS M8080A
M8080A Functional PIN Definition
Operation
Absolute Maximum Ratings
IOL = 1.9mA on all outputs
Symbol Parameter Min. Max Unit Test Condition
Silicon Gate MOS M8080A
~I~
Page
ROMs 8702A 8704 8708 8316A
Page
Silicon Gate MOS 8702A
Voo
Operating Characteristics
PIN Connections
Switching Characteristics
1N= Vee
~10%
= V ce
\ \
Cs=o.~
Operating Characteristics for Programming Operation
Symbol Test
Characteristics for Programming Operation
SYMBOLTESTMIN. TYP. MAX. Unit Conditions
Switching Characteristics for Programming Operation
CS = OV
Programming Operation of the 8702A
Program Operation
Operation of the 8702A in Program Mode
II. Programming of the 8702A Using Intel Microcomputers
III a Erasing Procedure
Programming Instructions for the 8702A
Page
PIN Configurations Block Diagram
PIN Names
Comment
III
IBB
VOH1
Symbol Parameter Typ. Max. Unit Conditions
Test Conditions
Waveforms
Max Unit
Programming Current RnA Program Pulse Amplitude
Parameter Min
TpF Program Pulse Fall Time
+-------1
Read/Program/Read Transitions
CS/WE = +12V
150 r
PEEEf!1EJEZPlEzz$m=2!·m·· Icc
Silicon Gate MOS
Comment
MAX Unit
CS=O.O
Outa
200ns 500ns 300 ns
~~~H --4!~--~N-~-TA-AL-~-DU-T--~\
100 ns 7001 JJ.s
Typical Characteristics
Cs .. o.~ ~r
Silicon Gate MOS
Ilcl
Ilpc
Ilkc
ILO
CIN
Conditions of Test for Characteristics
CoUT
~ ~ ~
Mask Option Specifications
Marking
Pppp
Customer Number Oate
~ r ------ + -- t --- . L . ------ rJ
Title Card
Blank
79-80
PIN Configuration Block Diagram
Intel Silicon Gate MOS ROM 8316A
CAPACITANCE2 TA = 25C, f = 1 MHz
400
Conditions of Test for
OU~TVALID
Waveforms
Typical D.C. Characteristics
ILICO.N Gate MOS ROM 8316A
Customer
Number Oate
STO
Mask Option Speci Fications
Title Card
COM~ANY Name
RAMs
Page
PIN Configuration Logic Symbol Block Diagram
Silicon Gate MOS
~E~~=~utP~-t-·7~igh-~\/oltage-~------ ---- --i2-+---=~== ~=
= OC
10H = -150 p.A
+----+
Conditions of Test
00 ~
Page
PIN Configuration Logic Symbol Block Diagram
Silicon Gate MOS
Symbol Parameter Min. Typ.r
III
ICC1
ICC2
Write 1~-tAW--.I-----I
550 200
Input Pulse Rise and Fall Times 20nsec
Timing Measurement Reference Level Volt
Page
Silicon Gate MOS
Power Dissipation Watt
5V to +7V
Comment
TA = OOC to +70C, Vee = 5V ±5% unless otherwise specified
85o-·-···T
+--~~~TL~~~EEt~~~P-.±
Capacitance T a = 25C, f = 1MHz
Conditions of Test
Typical A.C. Characteristics
~~~b~.J
Silicon Gate MOS 8102A-4
TA = OC to +70 o e, Vcc = 5V ±5% unless otherwise specified
300
450
230
VIN Limits VS. Temperature
Access Time VS Ambient Temperature
Access Time VS LOAD·CAPACITANCE
Output Source Current VS
Fully Decoded Random Access BIT Dynamic Memory
PIN Configuration Logic Symbol Block Diagram
Silicon Gate MOS 81078·4
IOOAV2
II.~
IMP~ri~~CE
Read Cycle
4000
Ref =
Write Cycle
Typical Characteristics
Numbers in parentheses are for minimum cycle timing in ns
Symbol Parameter Min Max
RWc 590 CD
Power Dissipation
Standby Power
Refresh
System Interfaces and Filtering
Typical System
BIT 256 x 4 Static Cmos RAM
ICC2
VIH VOL VOH
VOR
Icccr
Input Pulse Rise and Fall Times 20nsec
Timing Measurement Reference Level Volt
~I----- t CW2 ------ . t
PIN Configuration Logic Symbol
Schottky Bipolar
Conditions of Test
Voo- --- ---T
Power Supply Current Drain and Power Dissipation
All driver outputs are in the state indicated
Typical System
Dynamic Memory Refresh Controller
Page
8212 8255 8251
Page
PIN Configuration Logic Diagram
EIGHT-BIT INPUT/OUTPUT Port
Functional Description
OS2
Basic Schematic Symbols
II. Gated Buffer 3·STATE
Are 3-state
Gated Buffer
III. Bi-Directional Bus Driver
IV. Interrupting Input Port
Interrupt Instruction Port
BI-DIRECTIONAL BUS Driver
VI. Output Port With Hand-Shaking
VII Status Latch
8080 4
OvJ \.. -4~
Viii System
OUT
Vee
System
IX System
DalN-t?!NrJ
1G~D L-~
Characteristics
Absolute Maximum Ratings·
Typical Characteristics
052 ~
OUT
Tpw
12 pF
Switching Characteristics
TA = OC to + 75C Vee = +5V ± 5%
Programmable Peripheral Interface
~~~lEI~S 1-- +SV
General
Data Bus Buffer
Read/Write and Control Logic
Basic Functional Description
Reset
PIN Configuration
Group a and Group B Controls
Ports A, B, and C
Mode Selection
Single Bit Set/Reset Feature
Detailed Operational Description
PA 7 ·pAo
Interrupt Control Functions
Operating Modes Mode 0 Basic Input/Output
Mode 0 Timing
Mode 0 Port Definition Chart
Mode 0 Configurations
119
Operating Modes Mode 1 Strobed Input/Output
· / ,4
Input Control Signal Definition
IBF Input Buffer Full F/F
Intr Interrupt Request
Inte a
Output Control Signal Definition
Intea
Combinations of Mode
Bi-Directional Bus I/O Control Signal Definition
Operating Modes
Output Operations
Mode 2 Control Word
Mode 2 Bi-directional Timing
Mode 2 Combinations
Mode 2 and Mode 0 Output
Special Mode Combination Considerations
Mode Definition Summary Table
Source Current Capability on Port B and Port C
Reading Port C Status
Applications
Printer Interface
Keyboard and Display Interface
Keyboard and Terminal Address Interface
PCO
~.LEFT/RIGHT
Silicon Gate MOS
Characteristics TA = oc to 70C Vee = +5V ±5% vss = OV
Vil Input Low Voltage
Input High Voltage Val Output Low Voltage IOl = 1.6mA
Time From STB = 0 To IBF
Mode 0 Basic Input
Mode 1 Strobed Input
Mode 2 Bi-directional
Page
Programmable Communication Interface
Reset Reset
General
ReadlWrite Control logic
ClK Clock
Modem Control
DSR Data Set Ready
TxE Transmitter Empty
DTR Data Termin·al Ready
Receiver Buffer
Receiver Control
RxRDY Receiver Ready
RxC Receiver Clock
Mode Instruction
Command Instruction
Detailed Operation Description
Programming
Mode Instruction Definition
Asynchronous Mode Transmission
Asynchronous Mode Receive
Data C~~RACTER
Synchronous Mode Transmission
Synchronous Mode Receive
Mode Instruction Format, Synchronous Mode
Synchronous Mode, Transmission Format
Command Instruction Definition
Command Instruction Format
Status Read Definition
Status Read Format
Asynchronous Serial Interface to CRT Terminal, DC-9600 Baud
Asynchronous Interface to Telephone Lines
Synchronous Interface to Terminal or Peripheral Device
Synchronous Interface to Telephone Lines
IOL
Capacitance
Icc
TA = oc to 70C VCC = 5.0V ±5% Vss = OV Symbol Parameter
Typ
RxD
SRX ~4IlI
~AST BIT ,----1
RXD~
Peripherals
Page
High Speed 1 OUT of 8 Binary Decoder
System
Enable Gate
Decoder
Using a very similar circuit to the I/O port decoder, an ar
Port Decoder
Chip Select Decoder
24K Memory Interface
Logic Element Example
\lJ
JJ,.--+-I----.....1
Ill
Characteristics TA = OOC to +75C, Vee = 5.0V ±5%
Typical Characteristics
Symbol VOL VOH
8205
Switching Characteristics Conditions of Test Test Load
Address or Enable to Output Delay VS. Load Capacitance
Address or Enable to Output Delay VS. Ambient Temperature
Test Waveforms
~ ~
PIN Configuration
~ R
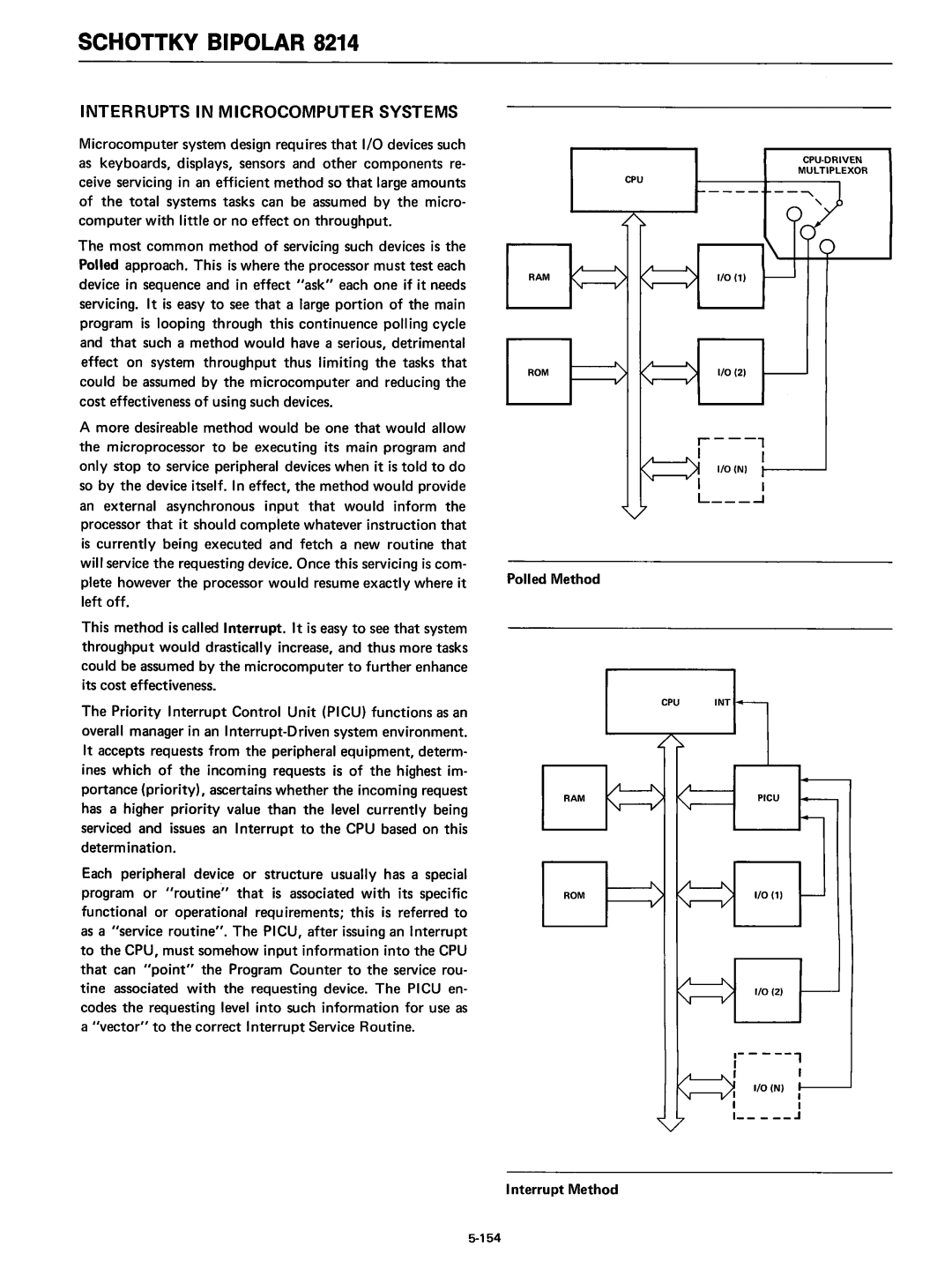
Interrupt Method
Interrupts in Microcomputer Systems
Polled Method
Priority Encoder
Current Status Register
Control Signals
INTE, elK
ElR, ETlG, ENGl
AO, A1, A2
Level Controller
Basic Operation
I I
Level Controller
Cascading
Operating Characteristics
Symbol Parameter Limits Unit Conditions Min Typ.£1
Los
Absolute Maximum Ratings
Characteristics and Waveforms TA = oc to +70C, vcc = +5V ±5%
Schottky Bipolar
+-......---- n cs
8216 8226
Bi-Directional Driver
Control Gating OlEN, CS
Large microcomputer systems it is often necessary to pro
Applications of 8216/8226
Memory and 1/0 Interface to a Bi-directional Bus
IcC Power Supply Current 120
Input Load Current OlEN, CS VF =0.45
Input Load Current All Other Inputs VF =0.45
Input Leakage Current OlEN, CS VR =5.25V
Waveforms
OUT
Page
8253 8257 8259
Page
Programmable Interval Timer
It uses nMOS technology ~Jmodesof operation are
Block Diagram
Preliminary Functional Description
System Interface
System Interface
Programmable DMA Controller
System Application
System Interface
Dack 2
CS-------It
LJJ
CPU Group
ROMs RAMs
Peripheral Coming Soon
Intel
It-j
~~~1
735~
\.--.J.. ~~~l
·34o~
Lead Plastic Dual IN-LINE Package P
Lead CerDIP Dual IN-LINE Package D
Sales and Marketing Offices
Distributors
Page
Page
Page
Page
Page
Page
Instruction SET
Instruction SET
Summary of Processor Instructions By Alphabetical Order
Microcomputer System Users Registration Card
Intel Corporation
Microcomputer Systems Bowers Avenue Santa Clara, CA
Inter