SPRS292 − OCTOBER 2005
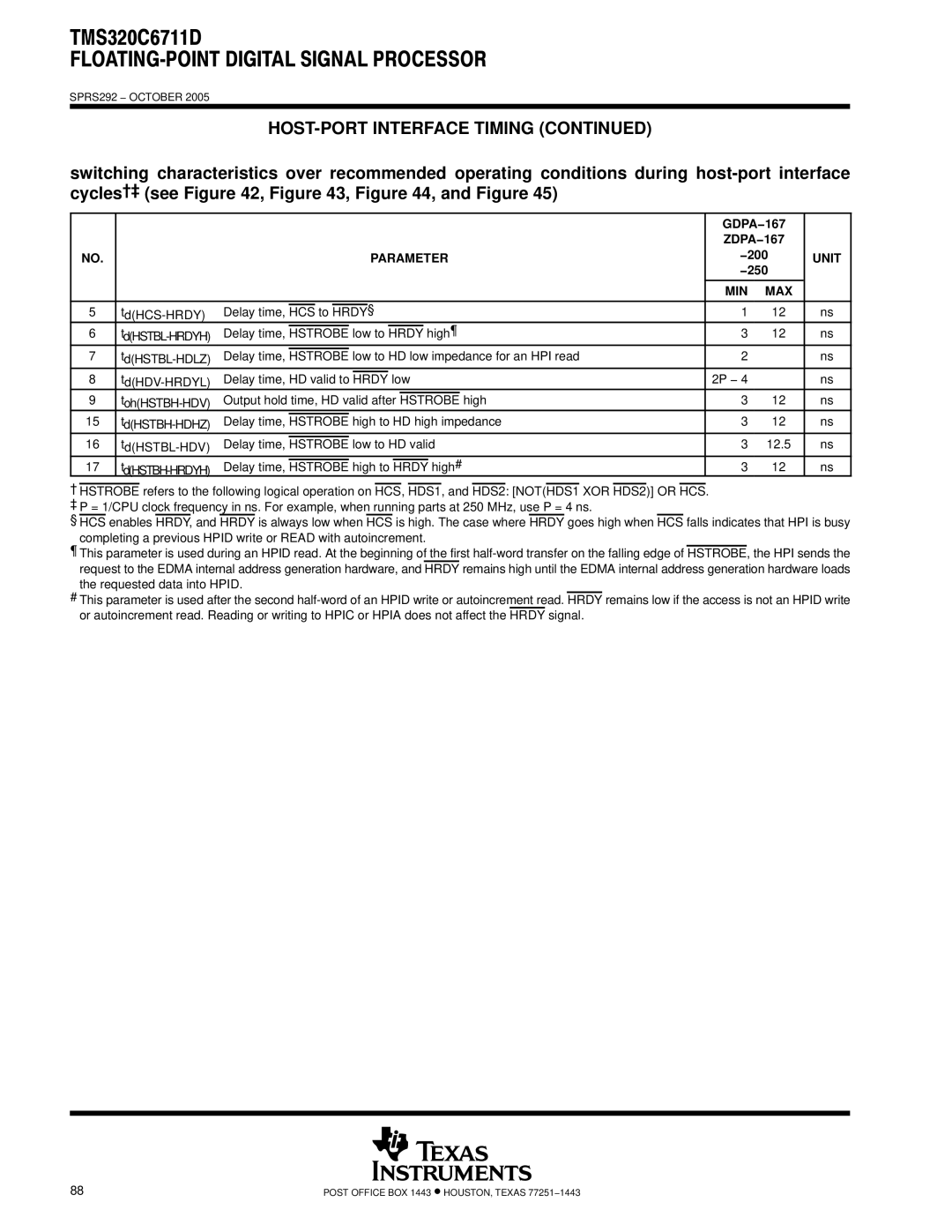
HOST-PORT INTERFACE TIMING (CONTINUED)
switching characteristics over recommended operating conditions during
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| GDPA−167 |
| |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ZDPA−167 |
| |
NO. |
|
|
|
|
|
|
|
| PARAMETER | −200 |
| UNIT | |||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| −250 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| MIN | MAX |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 | Delay time, |
| to |
|
|
|
| § |
|
|
|
|
|
|
| 1 | 12 | ns | |
HCS | HRDY | ||||||||||||||||||
6 | Delay time, |
|
|
|
| low to |
|
|
| high¶ | 3 | 12 | ns | ||||||
HSTROBE | HRDY | ||||||||||||||||||
7 | Delay time, |
|
|
|
| low to HD low impedance for an HPI read | 2 |
| ns | ||||||||||
HSTROBE |
| ||||||||||||||||||
8 | Delay time, HD valid to |
|
| low | 2P − 4 |
| ns | ||||||||||||
HRDY |
| ||||||||||||||||||
9 | Output hold time, HD valid after |
|
|
| high | 3 | 12 | ns | |||||||||||
HSTROBE | |||||||||||||||||||
15 | Delay time, |
|
|
| high to HD high impedance | 3 | 12 | ns | |||||||||||
HSTROBE | |||||||||||||||||||
16 | Delay time, |
|
|
|
| low to HD valid | 3 | 12.5 | ns | ||||||||||
HSTROBE | |||||||||||||||||||
17 | Delay time, |
|
|
|
| high to |
|
|
| high# | 3 | 12 | ns | ||||||
HSTROBE | HRDY | ||||||||||||||||||
†HSTROBE refers to the following logical operation on HCS, HDS1, and HDS2: [NOT(HDS1 XOR HDS2)] OR HCS.
‡P = 1/CPU clock frequency in ns. For example, when running parts at 250 MHz, use P = 4 ns.
§HCS enables HRDY, and HRDY is always low when HCS is high. The case where HRDY goes high when HCS falls indicates that HPI is busy completing a previous HPID write or READ with autoincrement.
¶ This parameter is used during an HPID read. At the beginning of the first
#This parameter is used after the second
88 | POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251−1443 |