SPRS292 − OCTOBER 2005
MULTICHANNEL BUFFERED SERIAL PORT TIMING (CONTINUED)
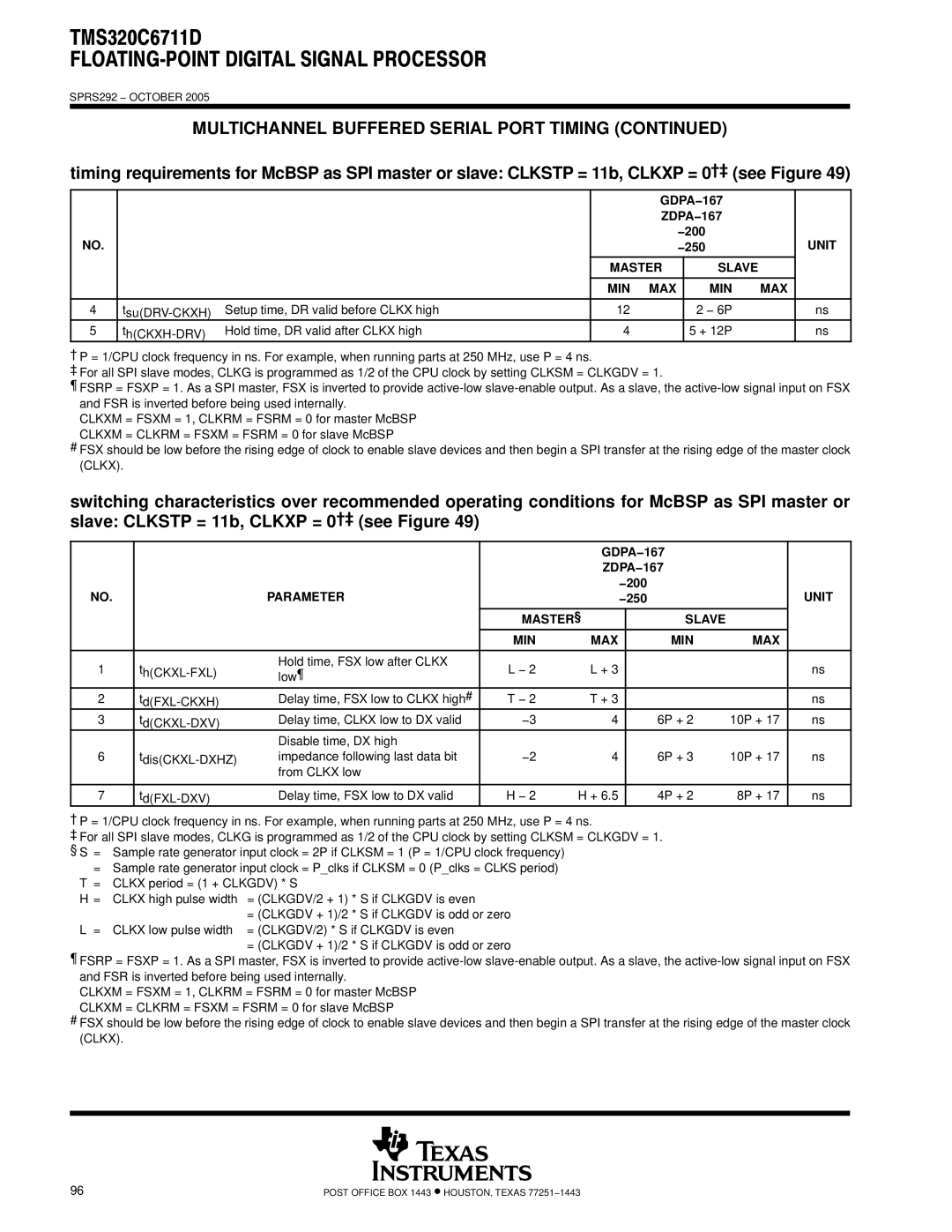
timing requirements for McBSP as SPI master or slave: CLKSTP = 11b, CLKXP = 0†‡ | (see Figure 49) | ||||||
|
|
| GDPA−167 |
|
| ||
|
|
| ZDPA−167 |
|
| ||
NO. |
|
|
| −200 |
| UNIT | |
|
|
| −250 |
| |||
|
|
|
|
|
|
| |
|
|
| MASTER |
| SLAVE |
| |
|
|
|
|
|
|
|
|
|
|
| MIN MAX |
| MIN | MAX |
|
|
|
|
|
|
|
|
|
4 | Setup time, DR valid before CLKX high | 12 |
| 2 − 6P |
| ns | |
5 | Hold time, DR valid after CLKX high | 4 |
| 5 + 12P |
| ns | |
†P = 1/CPU clock frequency in ns. For example, when running parts at 250 MHz, use P = 4 ns.
‡ For all SPI slave modes, CLKG is programmed as 1/2 of the CPU clock by setting CLKSM = CLKGDV = 1.
¶FSRP = FSXP = 1. As a SPI master, FSX is inverted to provide
CLKXM = FSXM = 1, CLKRM = FSRM = 0 for master McBSP CLKXM = CLKRM = FSXM = FSRM = 0 for slave McBSP
#FSX should be low before the rising edge of clock to enable slave devices and then begin a SPI transfer at the rising edge of the master clock (CLKX).
switching characteristics over recommended operating conditions for McBSP as SPI master or slave: CLKSTP = 11b, CLKXP = 0†‡ (see Figure 49)
|
|
|
| GDPA−167 |
|
| ||
|
|
|
| ZDPA−167 |
|
| ||
NO. |
| PARAMETER |
|
| −200 |
| UNIT | |
|
|
| −250 |
| ||||
|
|
|
|
|
|
|
| |
|
|
| MASTER§ |
| SLAVE |
|
| |
|
|
| MIN | MAX |
| MIN | MAX |
|
|
|
|
|
|
|
|
|
|
1 | Hold time, FSX low after CLKX | L − 2 | L + 3 |
|
|
| ns | |
¶ |
|
|
| |||||
|
| low |
|
|
|
|
|
|
2 | t | Delay time, FSX low to CLKX high# | T − 2 | T + 3 |
|
|
| ns |
|
|
|
|
|
|
|
| |
3 | Delay time, CLKX low to DX valid | −3 | 4 |
| 6P + 2 | 10P + 17 | ns | |
|
| Disable time, DX high |
|
|
|
|
|
|
6 | impedance following last data bit | −2 | 4 |
| 6P + 3 | 10P + 17 | ns | |
|
| from CLKX low |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
7 | Delay time, FSX low to DX valid | H − 2 | H + 6.5 |
| 4P + 2 | 8P + 17 | ns | |
†P = 1/CPU clock frequency in ns. For example, when running parts at 250 MHz, use P = 4 ns.
‡For all SPI slave modes, CLKG is programmed as 1/2 of the CPU clock by setting CLKSM = CLKGDV = 1. § S = Sample rate generator input clock = 2P if CLKSM = 1 (P = 1/CPU clock frequency)
=Sample rate generator input clock = P_clks if CLKSM = 0 (P_clks = CLKS period)
T = | CLKX period = (1 + CLKGDV) * S | |
H = | CLKX high pulse width | = (CLKGDV/2 + 1) * S if CLKGDV is even |
|
| = (CLKGDV + 1)/2 * S if CLKGDV is odd or zero |
L = | CLKX low pulse width | = (CLKGDV/2) * S if CLKGDV is even |
=(CLKGDV + 1)/2 * S if CLKGDV is odd or zero
¶FSRP = FSXP = 1. As a SPI master, FSX is inverted to provide
CLKXM = FSXM = 1, CLKRM = FSRM = 0 for master McBSP CLKXM = CLKRM = FSXM = FSRM = 0 for slave McBSP
#FSX should be low before the rising edge of clock to enable slave devices and then begin a SPI transfer at the rising edge of the master clock (CLKX).
96 | POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251−1443 |