Robertson AP45 Autopilot | Page |
Trouble shooting |
|
b.Enter the
c.Check all connections between the fluxgate compass and the FI100 unit and between the FI100 unit and the AP45 control unit. If found OK, proceed to "d".
d.Try a spare FI100 Fluxgate Interface
G40A GYRO INTERFACE
a.Verify that the gyrocompass is working properly.
b.Refer to “G40A Gyro Interface Unit” page
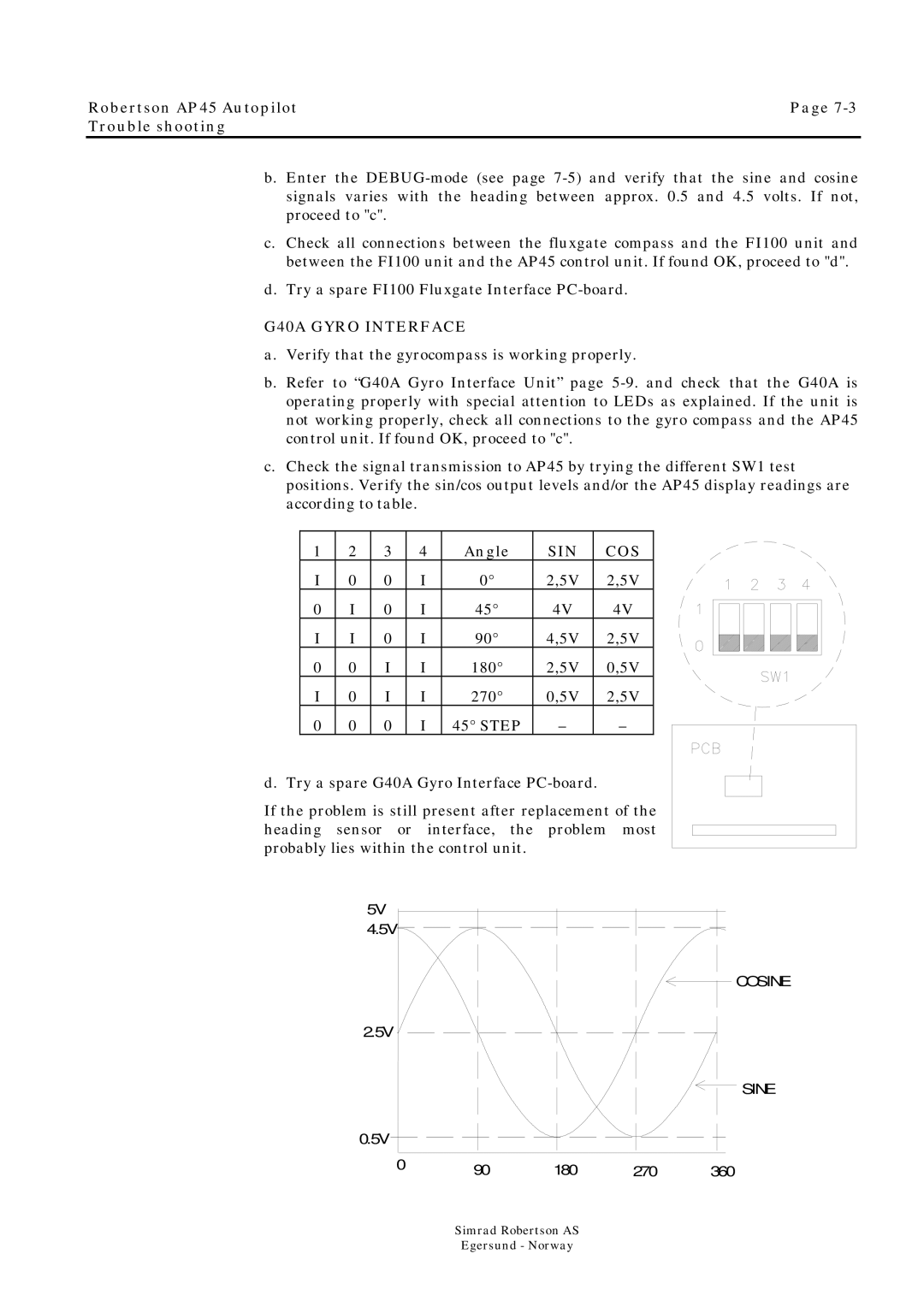
c.Check the signal transmission to AP45 by trying the different SW1 test positions. Verify the sin/cos output levels and/or the AP45 display readings are according to table.
1 | 2 | 3 | 4 | Angle | SIN | COS |
I | 0 | 0 | I | 0° | 2,5V | 2,5V |
0 | I | 0 | I | 45° | 4V | 4V |
I | I | 0 | I | 90° | 4,5V | 2,5V |
0 | 0 | I | I | 180° | 2,5V | 0,5V |
I | 0 | I | I | 270° | 0,5V | 2,5V |
0 | 0 | 0 | I | 45° STEP | – | – |
d. Try a spare G40A Gyro Interface
If the problem is still present after replacement of the heading sensor or interface, the problem most probably lies within the control unit.
5V
4.5V
COSINE
2.5V
SINE
0.5V
0 | 90 | 180 | 270 | 360 |
|
Simrad Robertson AS
Egersund - Norway