Page | Robertson AP45 Autopilot |
| Operation |
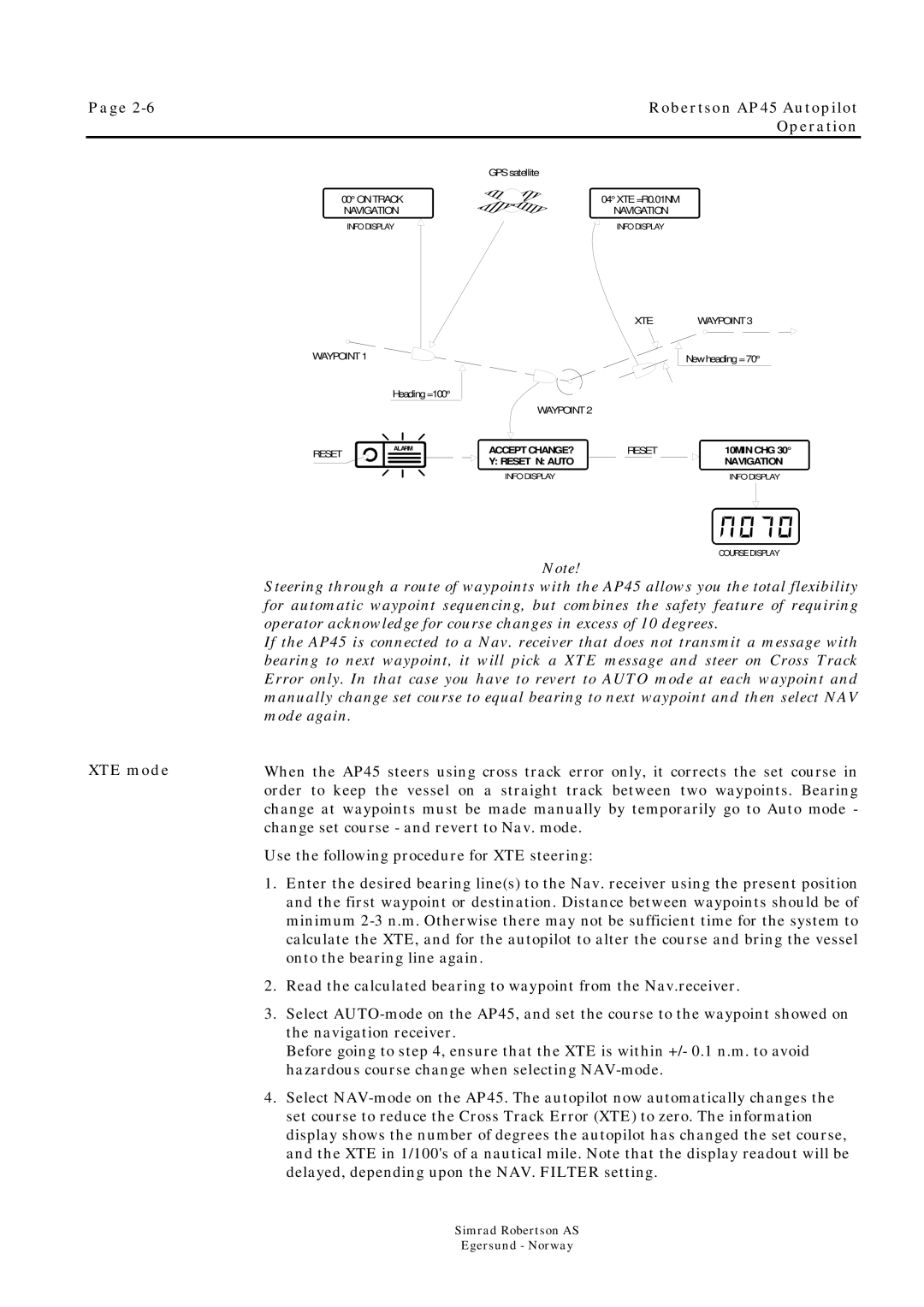
| GPS satellite |
00° ON TRACK | 04° XTE=R0.01NM |
NAVIGATION | NAVIGATION |
INFO DISPLAY | INFO DISPLAY |
XTE
WAYPOINT 1
Heading=100°
WAYPOINT 2
WAYPOINT 3
New heading = 70°
RESET
ALARM
ACCEPT CHANGE? | RESET | 10MIN CHG 30° |
Y: RESET N: AUTO |
| NAVIGATION |
INFO DISPLAY | INFO DISPLAY |
| COURSE DISPLAY |
| Note! |
| Steering through a route of waypoints with the AP45 allows you the total flexibility |
| for automatic waypoint sequencing, but combines the safety feature of requiring |
| operator acknowledge for course changes in excess of 10 degrees. |
| If the AP45 is connected to a Nav. receiver that does not transmit a message with |
| bearing to next waypoint, it will pick a XTE message and steer on Cross Track |
| Error only. In that case you have to revert to AUTO mode at each waypoint and |
| manually change set course to equal bearing to next waypoint and then select NAV |
| mode again. |
XTE mode | When the AP45 steers using cross track error only, it corrects the set course in |
| order to keep the vessel on a straight track between two waypoints. Bearing |
| change at waypoints must be made manually by temporarily go to Auto mode - |
| change set course - and revert to Nav. mode. |
| Use the following procedure for XTE steering: |
| 1. Enter the desired bearing line(s) to the Nav. receiver using the present position |
| and the first waypoint or destination. Distance between waypoints should be of |
| minimum |
| calculate the XTE, and for the autopilot to alter the course and bring the vessel |
| onto the bearing line again. |
| 2. Read the calculated bearing to waypoint from the Nav.receiver. |
| 3. Select |
| the navigation receiver. |
| Before going to step 4, ensure that the XTE is within +/- 0.1 n.m. to avoid |
| hazardous course change when selecting |
| 4. Select |
| set course to reduce the Cross Track Error (XTE) to zero. The information |
| display shows the number of degrees the autopilot has changed the set course, |
| and the XTE in 1/100's of a nautical mile. Note that the display readout will be |
| delayed, depending upon the NAV. FILTER setting. |
Simrad Robertson AS
Egersund - Norway